Force sensor set

Force sensor set
Monitors the force applied to the robot gripper so that copying and fitting work can be carried out as it would by a human operator.
Force sensor set features
Assembly/processing tasks are performed in the same manner as a human being, while sensing the force that is applied to the gripper.
Tasks requiring subtle adjustment and detection of force can be performed.
Improved production stability
- Parts can be inserted/attached without damage, while adjusting for displacement absorptions caused by parts variations and subtle external forces.
- Work stability is improved by position latching and retry processing at times of work failure.
- Furthermore, quality can be managed using log data, and the causes of work errors can be analyzed.
Realization of complex assembly and processing tasks
- Parts can be inserted/attached without damage, while adjusting for subtle external forces.
- Action direction and pushing force can be changed by detecting the contact force, and interrupt processing can be performed using trigger conditions that combine position information and force information.
Easy control and Simple operations
- Programs can be easily created using dedicated robot language.
Based on representative examples of application programs, work programs can be easily created in response to each customer's required task. - The robot can be quickly [taught] accurate positions based on position and force data from the teaching box.
Work conditions can be verified and adjusted by viewing the position and force data from the teaching box and the graph waveform on RT ToolBox3.
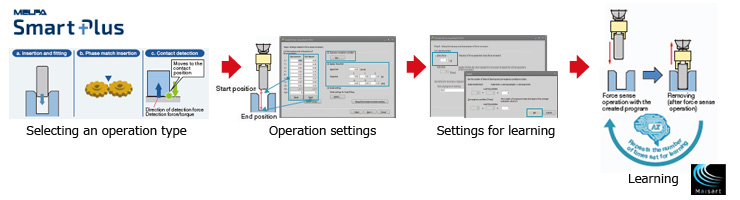
Enhancement function for force sense control (MELFA Smart Plus)
AI adjusts parameters automatically for optimum force sense control.
Parameters can be adjusted by anyone easily in a short amount of time as AI selects the most suitable parameter for you.
*This function is enabled when a MELFA Smart Plus card is inserted into the robot controller. (FR series compatible)
Function introduction
More accurate force sensor
Advances in force sensors allow faster and more accurate testing.
(FR series Q type is equivalent to F series.)

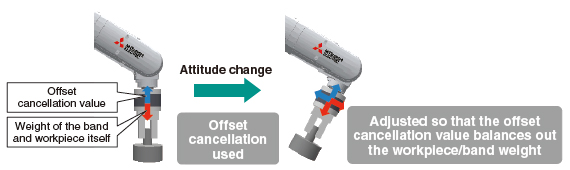
Gravitational offset cancellation
Advances in force sensors allow faster and more accurate testing.
(FR series Q type is equivalent to F series.)
Teaching work assistance (Force GUI included)
- • Computer software (RT ToolBox3) and a teaching box (R56TB or R32TB) are standard features of the force GUI screen, making it easy to use force sensors.
- • Teaching can be carried out while monitoring the reactive force on the force GUI screen.
- • Force data synchronized to the positional data can be saved as log data.
- • Log data can be viewed as graphs using RT ToolBox.
- • Log data files can be downloaded to a computer via FTP.