R&D / technology
R&D
R&D of Mitsubishi Electric
Message

Continuing to take on challenges to create value for the future with unprecedented new perspectives and ideas
Toru Oka
Executive Officer,
In charge of Intellectual Property,
Vice President, Corporate Research
and Development
The Mitsubishi Electric Group is committed to achieving sustainability based on our basic philosophy of "addressing social challenges through our businesses." In order to address complex and diversified challenges, we utilize various data gathered in the digital space while backcasting from the future society. The Mitsubishi Electric Group is working to transform itself into a "Circular Digital-Engineering Company" where the Group’s experts connect with each other to share their knowledge, create new value, and address social challenges with customers.
We believe that we can resolve difficult issues with our broad range of business operations and our world-class, wide-ranging technologies and human capital.
Furthermore, with the belief that integrating cutting-edge knowledge is the key to quickly creating innovative technologies, we will continue to openly promote innovation and take on challenges for improving value.
Here, we are fortunate to have many colleagues who inspire each other and an environment that enables us to engage in cutting-edge research. We also have many opportunities to implement our own ideas in society. Additionally, we are challenging ourselves to develop new technologies that have the potential to bring about game-changing innovations.
What we need now is unprecedented new perspectives and ideas, as well as the ability to integrate them. Let's grow together and create value for the future with the aim of becoming R&D centers recognized around the world.
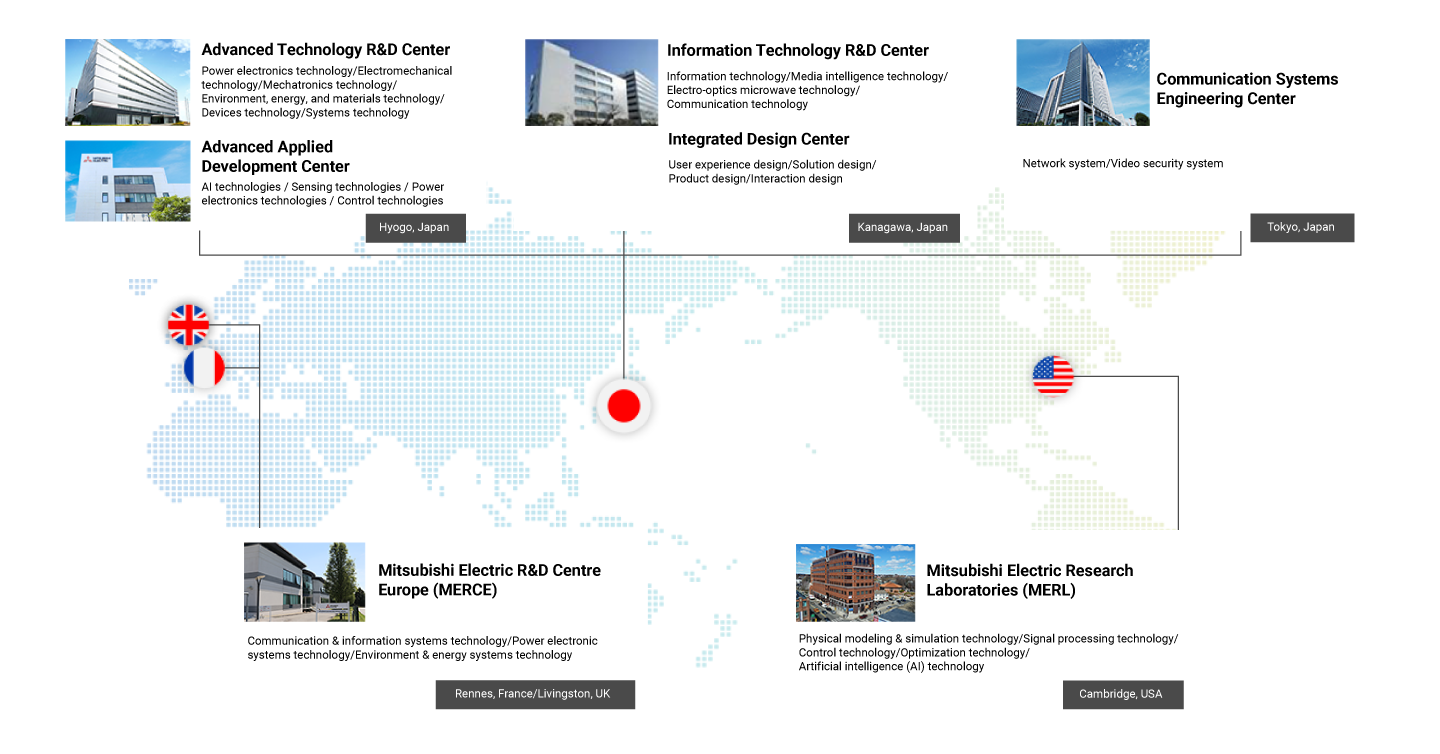
R&D Organization
In the Mitsubishi Electric Group's wide range of business fields, we are continuously deepening our basic technologies, while at the same time working globally to search for and create new technologies that will be the source of our next growth.
-

Advanced Technology R&D Center
We are innovating a wide range of new technologies from fundamental research to the development of next-generation products and services. We are also developing technology that provides solutions to social issues.
-

Information Technology R&D Center
By promoting cutting-edge research and development in a wide range of information and communication technologies, from cryptography and artificial intelligence to radar systems and artificial satellites, we contribute to people and society.
-

Integrated Design Center
With an eye to the future, we create new value by designing products and services from a people-centered perspective to solve social issues.
-

Communication Systems Engineering Center
With communication and imaging technologies at the core, we have been working to design and propose new systems in a wide range of business fields by using advanced technologies.
-

Advanced Applied Development Center
With sensing, control, and power electronics technologies as our core, we are working to address social challenges through the development of applied technologies that also incorporate elemental technologies.
-

Mitsubishi Electric Research Laboratories (MERL)
We conduct application-motivated basic research and advanced development in Physical modeling & simulation, Signal processing, Control, Optimization, and Artificial intelligence. We are an open laboratory, strongly involved with the world research community by publishing our work and collaborating with numerous interns and universities.
-

Mitsubishi Electric R&D Centre Europe (MERCE)
With two research centers in France and the United Kingdom, located in Europe's leading R&D community, we research and develop next-generation communication and information systems, power electronics systems, and environmental and energy systems.