Pilihan perluasan fungsi MELFA Smart Plus


2D vision sensor enhancement function
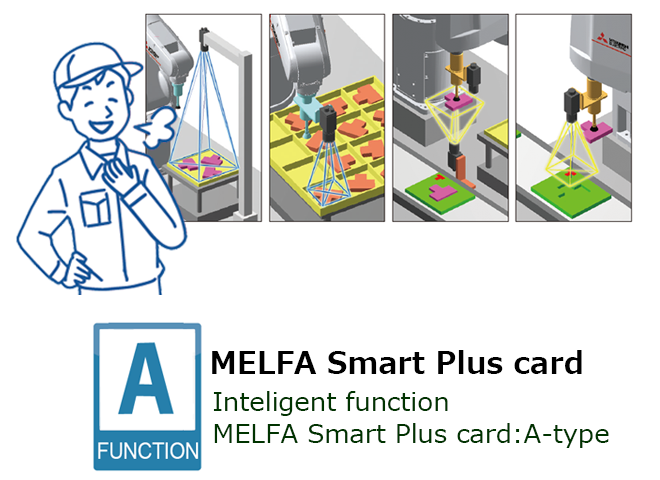
Aplikasi visi dapat disiapkan dengan mudah dengan mengikuti petunjuk pada layar pengaturan, bahkan saat program robot yang memerlukan pengetahuan khusus belum dibuat.
Berbagai jenis aplikasi tersedia untuk berbagai penyelarasan visi, termasuk operasi pick-and-place dan koreksi kesalahan pegangan.
Jenis kartu MELFA Smart Plus yang didukung
Untuk detail tentang fungsi ini, silakan lihat katalog "MELFA Smart Plus".
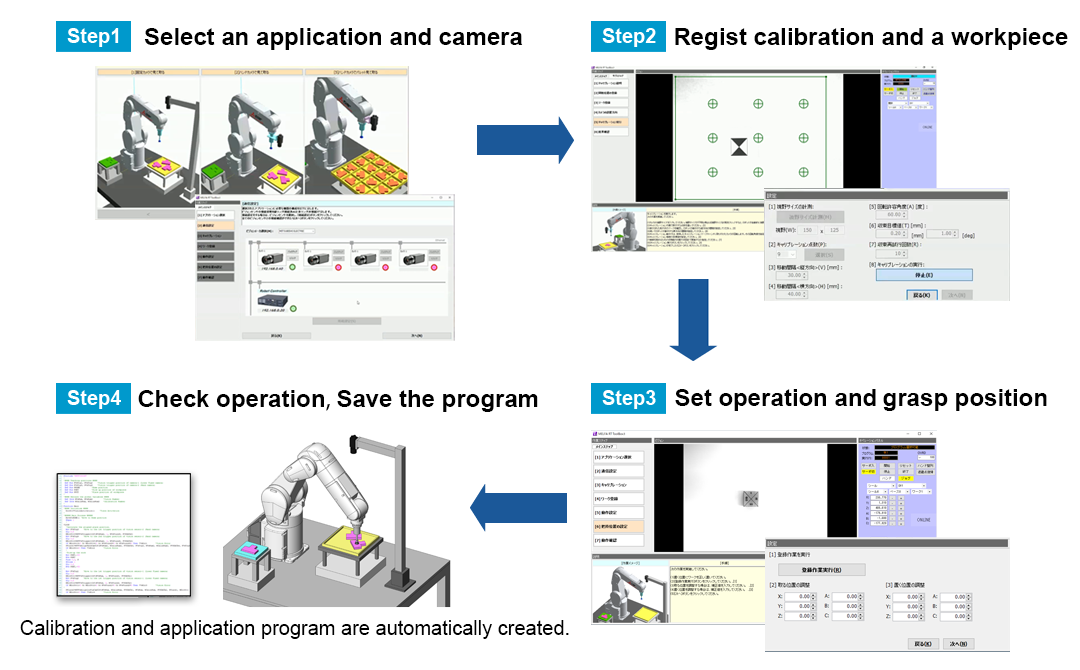
Pengaturan Mudah
Langkah-langkah dari pengaturan hingga pembuatan program dapat dilakukan dengan mudah dengan mengikuti langkah-langkah di layar.
Memeriksa animasi pada fungsi ini memungkinkan Anda menemukan aplikasi yang ingin Anda atur dengan mudah.
Perangkat yang didukung
Jenis kartu MELFA Smart Plus
| Component name | Nama Model | |
|---|---|---|
| MELFA Smart Plus card | A-type | 2F-DQ511 |
| MELFA Smart Plus card pack | A-type | 2F-DQ510 |
| AB-type | 2F-DQ520 | |
Robot
| Robot Type | Robot controller | RT ToolBox3 |
|---|---|---|
| FR series, CR series | CR800-D/R/Q Ver.C2b or later. | Ver.1.91V or later |
Sensor Penglihatan dan Tangan
| Vison sensor | Mitsubishi Electric:MELSENSOR VS70/VS80 series Cognex:In-Sight 7000/8000 |
|---|---|
| Hand (*1) | Only a single hand compatible with ON/OFF control of the robot hand dedicated output signal or general-purpose output signal is available. For pneumatic hands, both single solenoid type and double solenoid type are available. (*1: The multifunctional electric gripper option is not available.) |
Contoh video aplikasi
Klik salah satu ilustrasi aplikasi berikut, dan Anda dapat melihat film animasi aplikasi yang diinstal dalam fungsi ini.
Dengan memeriksa animasi, siapa pun dapat menemukan aplikasi yang ingin Anda atur dengan mudah.
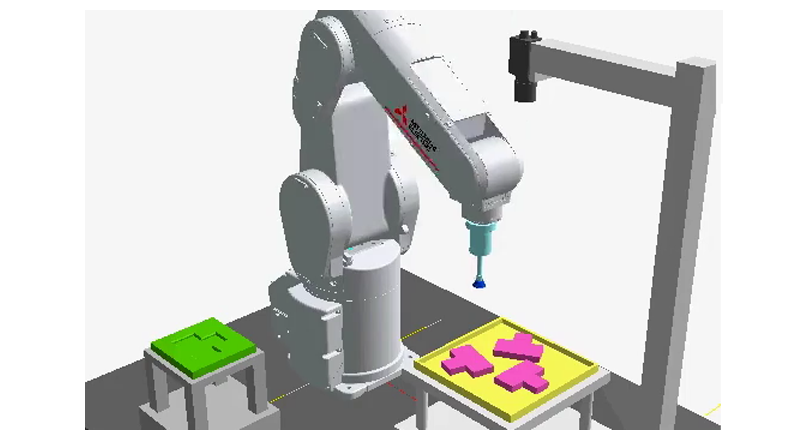
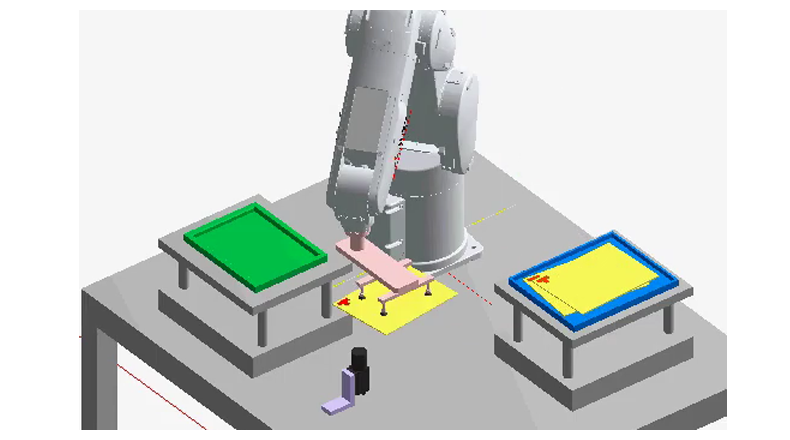
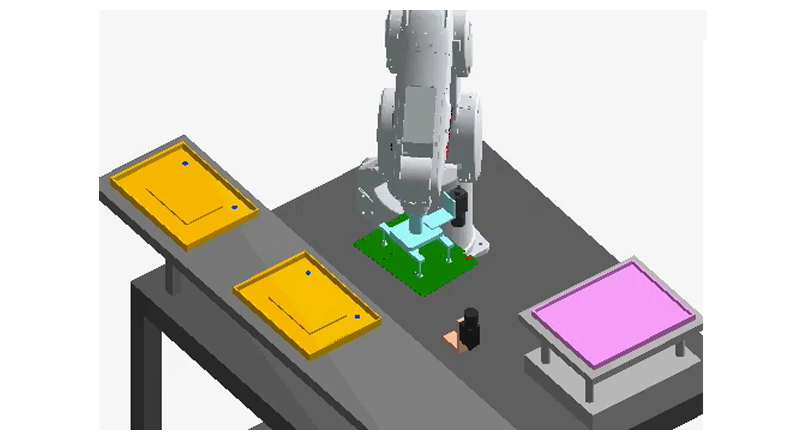
1.Pilih bagian menggunakan kamera tetap
Kamera tetap menghadap ke bawah x 1
Robot tipe Vertikal atau Horizontal
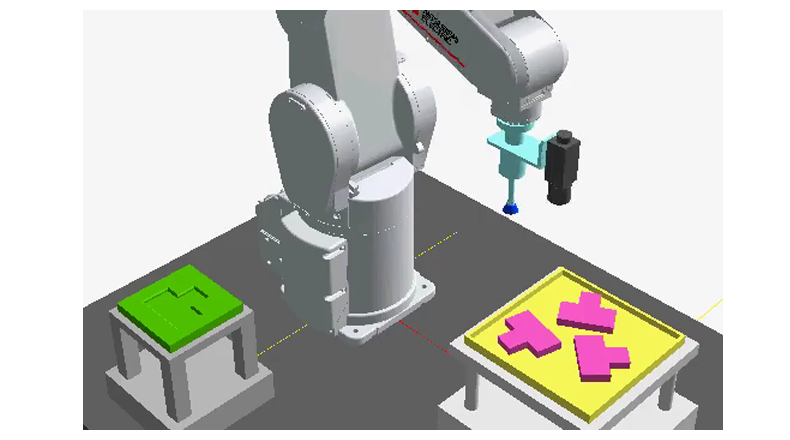
2.Pilih bagian menggunakan kamera genggam
Kamera genggam x 1
Robot tipe Vertikal atau Horizontal
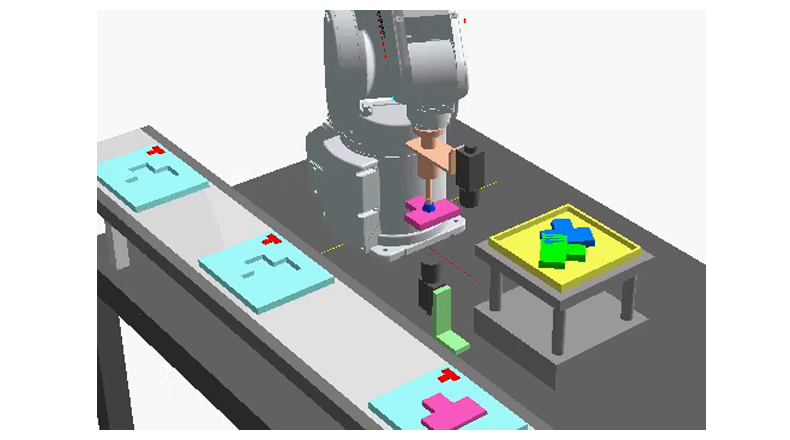
3.Memperbaiki kesalahan pegangan menggunakan kamera tetap yang menghadap ke atas
Kamera tetap yang menghadap ke atas x 1
Robot tipe Vertikal atau Horizontal
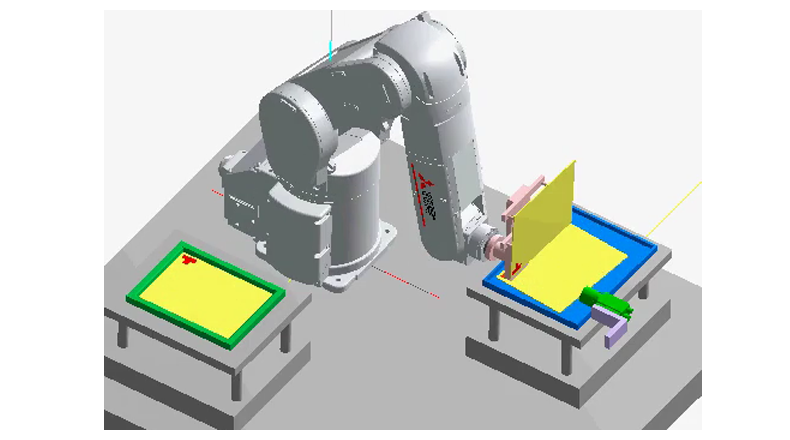
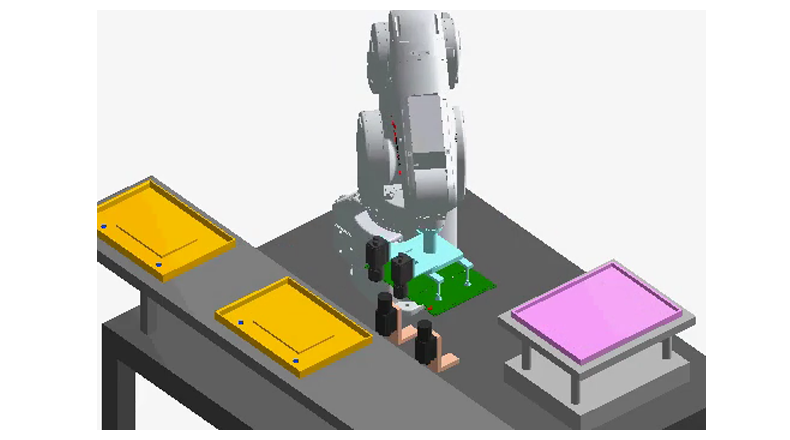
4.Memperbaiki kesalahan pegangan kamera tetap yang menghadap ke samping
Kamera tetap menyamping x 1
Robot tipe vertikal
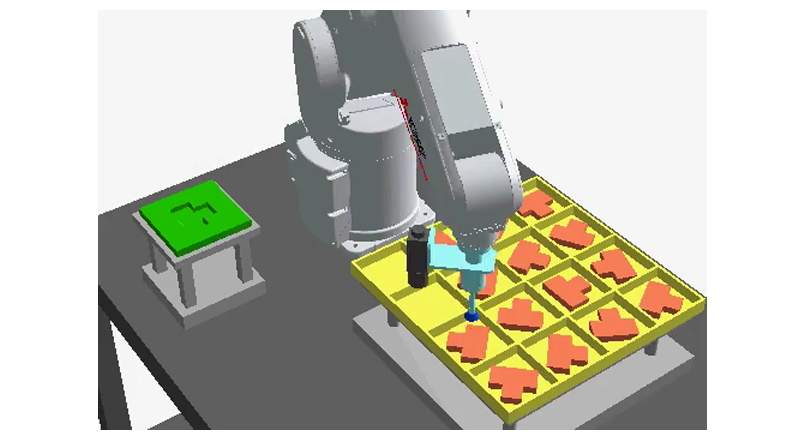
5.Pilih bagian dari palet menggunakan kamera genggam
Kamera genggam x 1
Robot tipe Vertikal atau Horizontal
6.Menggunakan kamera genggam, mengoreksi kesalahan genggaman dengan kamera tetap
Kamera samping tetap x 1, Kamera genggam x 1
Robot tipe vertikal
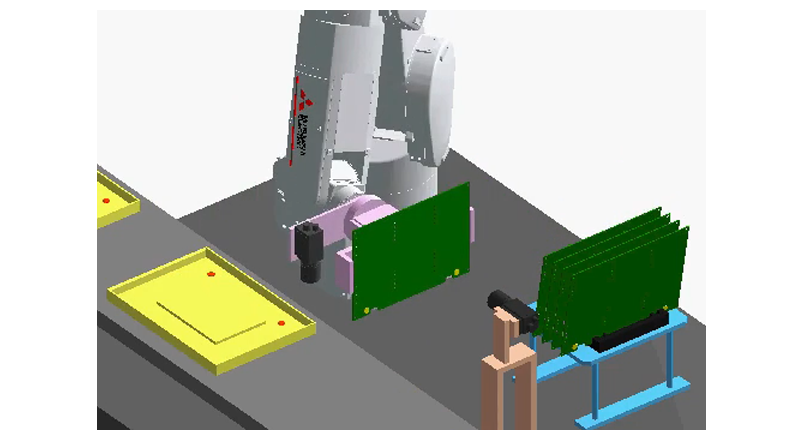
7.Perbaiki kesalahan pegangan dan tempatkan bagian (1)
Kamera menghadap ke atas x 1, Kamera tangan x 1
Robot tipe Vertikal atau Horizontal
8.Perbaiki kesalahan pegangan dan tempatkan bagian (2)
Kamera menghadap ke atas x 1, Kamera tangan x 1
Robot tipe Vertikal atau Horizontal
9.Perbaiki kesalahan pegangan dan tempatkan bagian (3)
Kamera menghadap ke atas tetap x 2, Kamera tangan x 2
Robot tipe Vertikal atau Horizontal