-
1.2
-
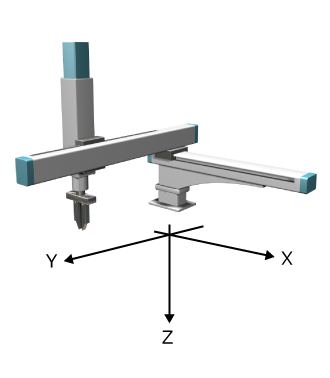
Örnek Sistem
Bu kursta kullanılacak sistem 3 eksenli bir X-Y-Z koludur.
Makine teknik özellikleri için, aşağıdaki tabloya başvurunuz.
 |
|
||||||||||||||||||||
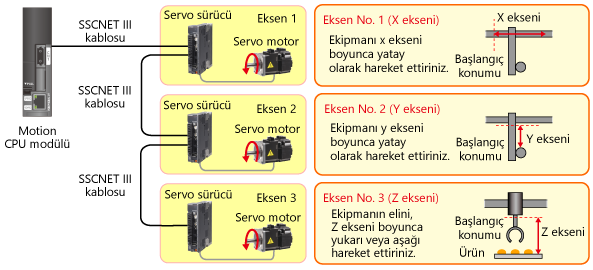
| <Servo motor dönüş yönü> Makine teknik özelliklerinden, makineyi ileri dönüş yönünde hareket ettirirken servo motorun dönüş yönünü dikkate alınız. Dönüş yönü, yükleme tarafından (makine montaj tarafından) bakıldığında saat yönünün tersi (CCW) veya saat yönüdür (CW). Örnek sistemde, her eksen ileri dönüş komutuyla saat yönünün tersine (CCW) döndürülür. <Başlangıç konumuna dönüş yönteminin dikkate alınması> Durma konumu hatalarını ortadan kaldırmak için her eksen için başlangıç konumuna dönüşü gerçekleştiriniz. Başlangıç konumuna dönüş için birden fazla yöntem vardır. Sistemin makine teknik özelliklerine göre yöntemi seçiniz. Örnek sistemde, başlangıç konumuna dönüş her eksen için proximity dog yöntemiyle gerçekleştirilir. |
 |