MELSERVO-J5 Series Servo Amplifier Product Lines

- MR-J5-G
- MR-J5-B
- MR-J5-A
- MR-J5-G-N1
- Board-Type Servo Amplifier MR-MD333G(-N1) NEW
- Simple Converter MR-CM
- Related Link
MR-J5-G

MR-J5-G
Supports Ethernet-based CC-Link IE TSN, featuring high-speed, large-capacity communication (1 Gbps). Communication cycle of ≥ 31.25 μs and speed frequency response of 3.5 kHz enable advanced motion control.

MR-J5W2-G
MR-J5W3-G
Drives a maximum of two/three servo motors. This simplifies wiring, saves energy, and enables a compact machine.

MR-J5D1-G4 *1
MR-J5D2-G4
MR-J5D3-G4
The drive unit is a converter separate type servo amplifier (1/2/3-axis type available). Combined with an MR-CV_4 power regeneration converter unit, the drive unit can create an energy-saving servo system.
- *1. MR-J5-G/MR-J5D1-G4 are also compatible with CC-Link IE Field Network Basic.
MR-J5-B

MR-J5-B
Supports optical network SSCNET III/H.
Communication cycle of ≥ 0.222 ms and speed frequency response of 3.5 kHz enable advanced motion control.

MR-J5W2-B
MR-J5W3-B
Drives a maximum of two/three servo motors. This simplifies wiring, saves energy, and enables a compact machine.
MR-J5-A
General purpose interface

MR-J5-A
Enables position control by pulse train command and speed/torque control by analog voltage command.
The maximum command pulse frequency is 4 Mpulses/s.
MR-J5-G-N1 *1 *2

MR-J5-G-N1
Supports Ethernet-based multi-networks. Communication cycle of ≥ 125 μs and speed frequency response of 3.5 kHz enable advanced motion control.

MR-J5W2-G-N1
MR-J5W3-G-N1
Drives a maximum of two/three servo motors. This simplifies wiring, saves energy, and enables a compact machine.

MR-J5D1-G4-N1
MR-J5D2-G4-N1
MR-J5D3-G4-N1
The drive unit is a converter separate type servo amplifier (1/2/3-axis type available). Combined with an MR-CV_4 power regeneration converter unit, the drive unit can create an energy-saving servo system.
- *1. EtherCAT ® is supported by MR-J5-G-N1/MR-J5-G-HSN1/MR-J5-G-RJN1/MR-J5W_-G-N1/MR-J5D_-G4-N1.
- *2. EtherNet/IP TM is supported by MR-J5-G-HSN1/MR-J5-G-RJN1/MR-J5W_-G-N1/MR-J5D_-G4-N1.
Board-Type Servo Amplifier MR-MD333G(-N1) *1
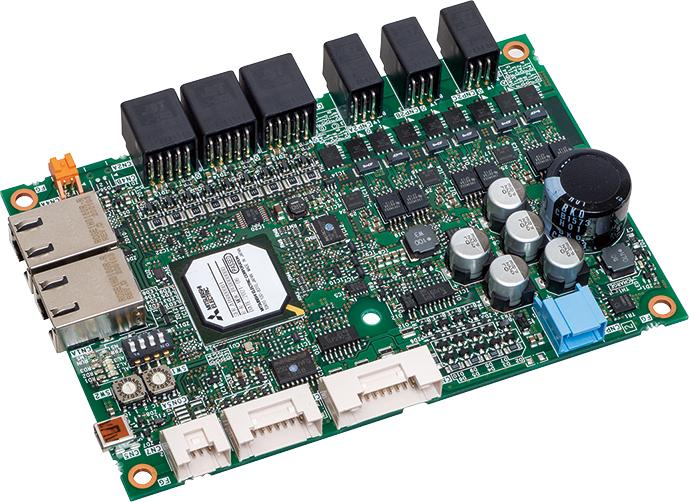
MR-MD333G(-N1) NEW
Supports CC-Link IE TSN/EtherCAT ® and features MELSERVO-J5 series functions. *1
The servo amplifier requires little installation space and less wiring by controlling three axes with one board. In addition, the servo amplifier has a vibration resistance of 39 m/s 2 *2 in three directions, allowing installation on machine moving parts.
- *1. CC-Link IE TSN is supported by MR-MD333G, while EtherCAT ® is supported by MR-MD333G-N1.
- *2. The vibration resistance of 39 m/s 2 is applicable under continuous vibration of 10 Hz to 55 Hz (directions of X, Y, and Z axes).
Simple Converter MR-CM

MR-CM3K
Drives 200 V servo amplifiers using a common bus connection.
The simple converter saves energy by efficiently using regenerative power and eliminates a regenerative option by dispersing regenerative energy to each servo amplifier. *1
In addition, the simple converter reduces the number of molded-case circuit breakers and magnet contactors, resulting in simple wiring.

MR-CM08K1 NEW
Drives 200 V servo amplifiers in 100 V using a common bus connection.
The simple converter saves energy by efficiently using regenerative power and eliminates a regenerative option by dispersing regenerative energy to each servo amplifier. *1
In addition, the simple converter reduces the number of molded-case circuit breakers and magnet contactors, resulting in simple wiring.
- *1. A regenerative option can be eliminated depending on the operation pattern and the system configuration.