Human-Machine Interfaces(HMIs)-GOT GOT2000 Series

GOT and servo system configurations
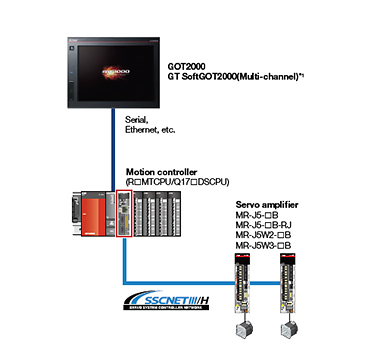
MELSERVO-J5
System configuration
J5-CASE1
System configuration
J5-CASE2
System configuration
J5-CASE3
System configuration
J5-CASE4
*1 Only Ethernet connection is supported.
System configuration
J5-CASE5
*1 Only Ethernet connection is supported.
System configuration
J5-CASE6

- * Supported functions and specifications differ depending on controllers. For details, please refer to the relevant product manual.
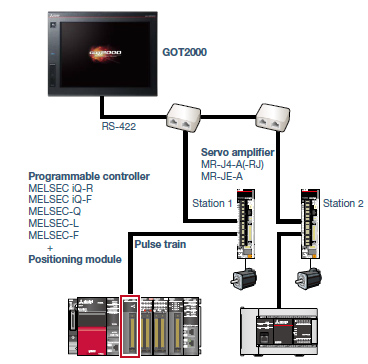
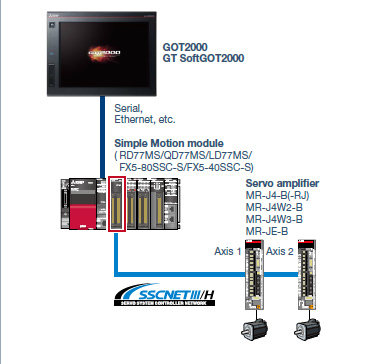
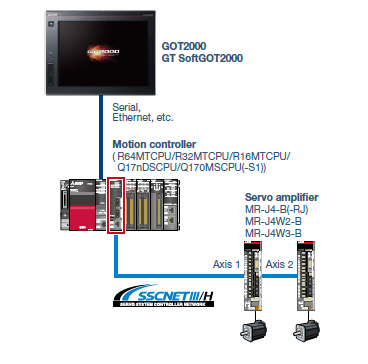
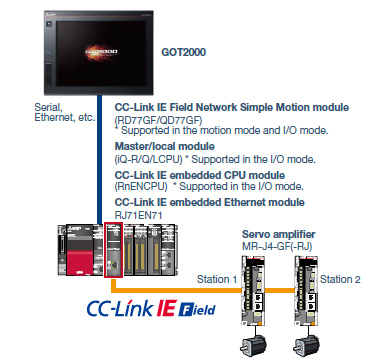
MELSERVO-J4
System configuration
J4-CASE1

System configuration
J4-CASE2

*1 Only Ethernet connection is supported.
System configuration
J4-CASE3

*1 Only Ethernet connection is supported.
System configuration
J4-CASE4

*1 Only Ethernet connection is supported.
- * Supported functions and specifications differ depending on controllers. For details, please refer to the relevant product manual.
MELSERVO-JET
System configuration
JET-CASE1

System configuration
JET-CASE2

System configuration
JET-CASE3

System configuration
JET-CASE4

- * Supported functions and specifications differ depending on controllers. For details, please refer to the relevant product manual.
MELSERVO-JE
System configuration
JE-CASE1

System configuration
JE-CASE2

*1 Only Ethernet connection is supported.
System configuration
JE-CASE3

- * Supported functions and specifications differ depending on controllers. For details, please refer to the relevant product manual.