Product Features

Improved safety through collaborative work applications
Collaborative human-machine operation support that includes safety options allows working areas to be used jointly by people and robots.
This ensures that factories provide both productivity and flexibility.
(*Customers must conduct risk assessments.)
-
Please refer to the "Catalogs" for a robot and the details of the robot arm options.
Safety option
Operators can enter an operation area without stopping robots.
- High safety compliant with international standards.
- The safety input function enables safety doors to open without causing an emergency stop of the robot.
- While an operator is in a cooperative operation area, a robot does not approach the area. (Operation range limit function)
- A robot in cooperative operation continues its operation at the safety speed to secure operator's safety.
- Closing the safety door switches cooperative operation to single operation, and enables the robot to approach to the shared area.
- *Risk assessment and safety level proof need to be performed for the system. Please contact us if you require any further information.
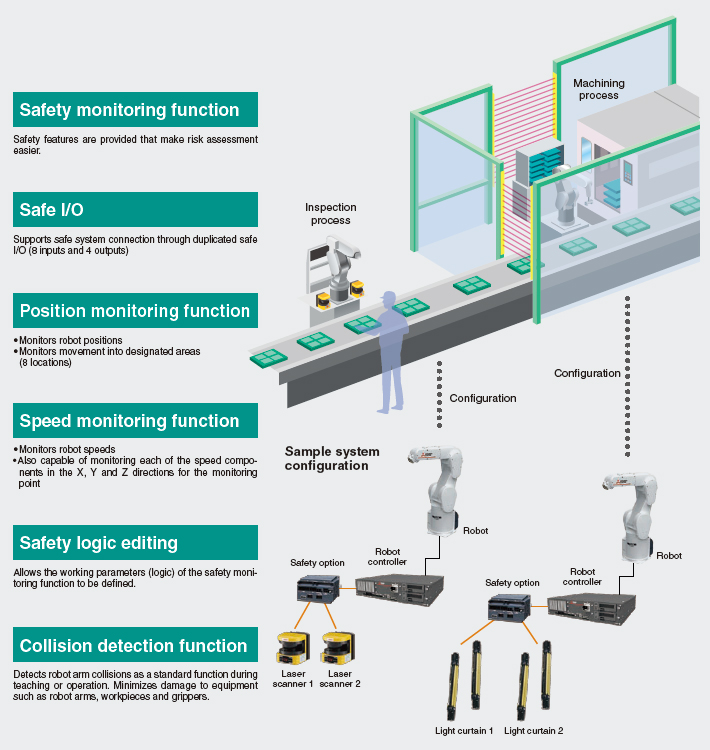
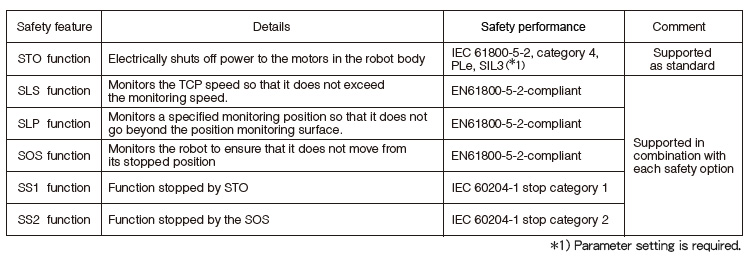
Safety monitoring function
Safety features compliant with the requirements of international standards are provided that make risk assessment easier.
Safe I/O
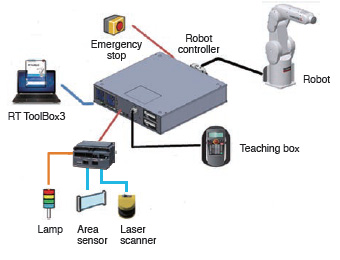
Expands duplicated safe I/O to 8 inputs and 4 outputs. Allows the construction of various different safety systems.
Position monitoring function
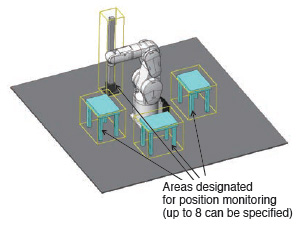
- Monitors robot positions.
- Monitors movement into designated areas in up to 8 locations.
Speed monitoring function
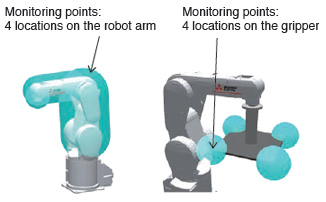
- Monitors robot speeds.
- Monitors designated monitoring points on the the robot arm and gripper to ensure that they do not exceed the monitoring speed.
- Also allows monitoring of each of the X-, Y- and Z-direction components for each monitoring point.
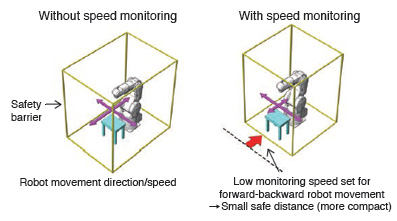
- By setting a low monitoring speed in the system for directions in which the robot does not move, safe distances can be made smaller to create compact cells safely.
Safety logic editing
- The logic for each safe I/O can be edited. Safety logic editing makes it easier to construct and operate safe systems.
Because it allows you to freely define the operating parameters (logic) for the safety monitoring functions in the robot controller, you can configure the safety monitoring conditions without having to use a safety CPU. - By configuring the parameters in the editing screen, you can use various different types of monitoring.
For example, in area monitoring, specified functions operate in response to the robot position, while in interlock monitoring, specified safety functions operate according to the the positions of other robots.
Collision detection function (Standard feature)
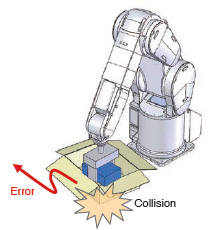
- This function detects if the arm collides with an obstacle while teaching or operating, and helps reduce damage to the robot arm and tools.
- The collision detection function can be used to protect the workpiece from becoming damaged due to interference between the workpiece and affected objects.
- The detection level can be changed according to the protection targets.
- Operation following collision detection can be programmed to suit the circumstances.
E.g.) Stop immediately and post an error; retract and thenpost an error, etc.