Phần mềm điều khiển chuyển động SWM-G Tính năng


- Khái niệm
- Tính năng
- Nhiều chức năng điều khiển chuyển động
- Bao phủ nhiều ứng dụng đa trục
- Trạm vận hành công cụ kiểm tra tích hợp SWM-G
- Cài đặt và điều chỉnh nhiều bộ khuếch đại servo
- Bản dùng thử SWM-G-W
- Chương trình mẫu
- Thư viện mẫu
- CC-Link IE TSN
- Bộ khuếch đại Servo MELSERVO-J5/MELSERVO-JET
- Thông số kỹ thuật
- Liên kết liên quan
Khái niệm

Tính năng
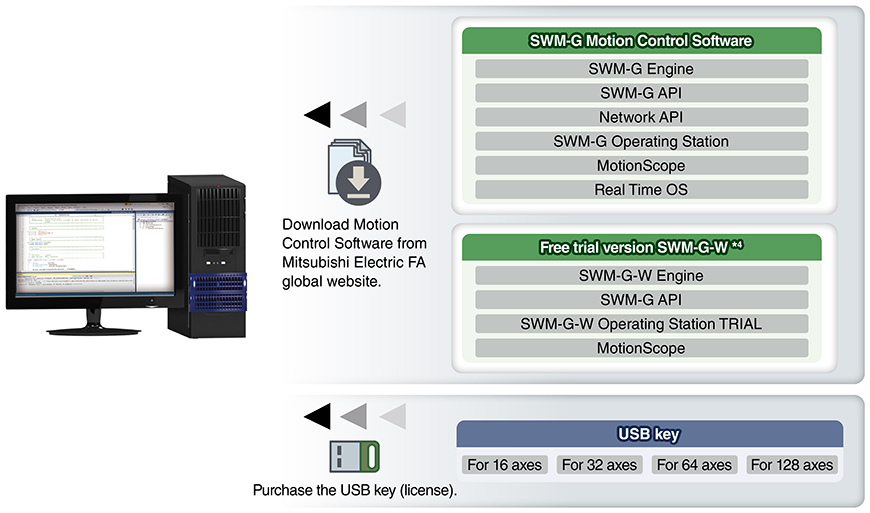
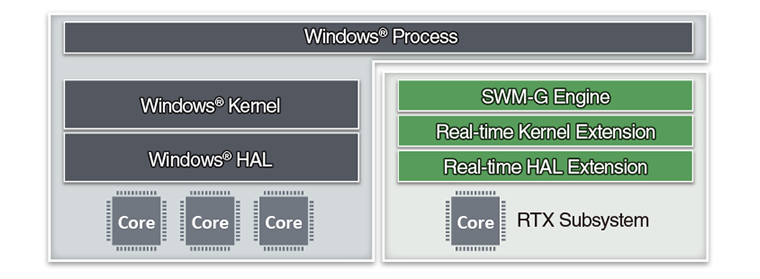
Cài đặt trên máy tính cá nhân, Phần mềm điều khiển chuyển động SWM-G có thể thực hiện điều khiển chuyển động và mạng.
- Hỗ trợ hệ thống điều khiển servo CC-Link IE TSN với máy tính cá nhân nơi cài đặt RTX64 (mở rộng thời gian thực).
(RTX64 được bao gồm với SWM-G.) - Đáp ứng nhiều nhu cầu ứng dụng bằng cách cung cấp các loại điều khiển chuyển động khác nhau, chẳng hạn như điều khiển vị trí, đồng bộ, cam, tốc độ và mô-men xoắn bằng cách sử dụng thư viện API cho điều khiển chuyển động.
- Sử dụng điều khiển mạng để kết nối và thiết lập các trạm thiết bị khác nhau (mô-đun I/O từ xa, v.v.) và các thiết bị TCP/IP.
SWM-G
- Số trục điều khiển tối đa: 128
- Chu kỳ hoạt động tối thiểu: 125 μs
- Ngôn ngữ lập trình: Visual C ++ ®
- Khóa USB (giấy phép):
- MR-SWMG16-U: 16 trục
- MR-SWMG32-U: 32 trục
- MR-SWMG64-U: 64 trục
- MR-SWMG128-U: 128 trục
SWM-G-N1
- Số trục điều khiển tối đa: 128
- Chu kỳ hoạt động tối thiểu: 125 μs
- Ngôn ngữ lập trình: Visual C ++ ®
- Khóa USB (giấy phép):
- MR-SWMG16N1-U: 16 trục
- MR-SWMG32N1-U: 32 trục
- MR-SWMG64N1-U: 64 trục
- MR-SWMG128N1-U: 128 trục
SWM-G-W
- Số trục điều khiển tối đa: 64
- Ngôn ngữ lập trình: Visual C ++ ®
Nhiều chức năng điều khiển chuyển động
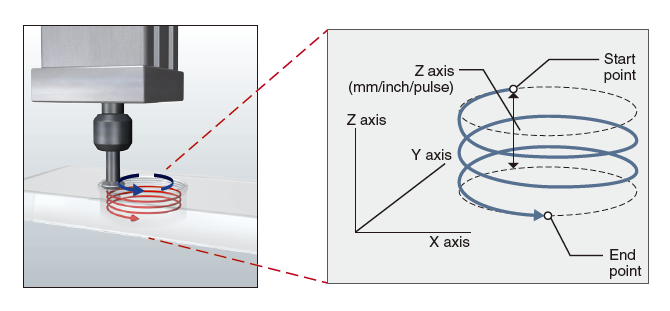
Kiểm soát định vị
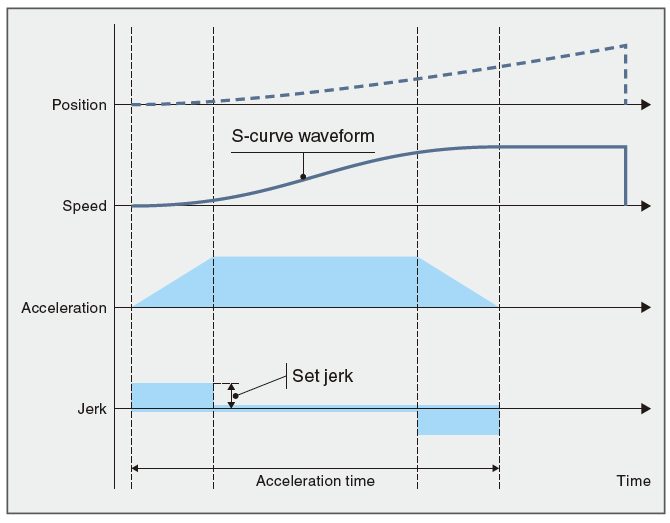
Trong phương pháp này, một trục có thể được tăng tốc dần dần thông qua việc điều chỉnh độ giật để giảm thiểu rung động của máy.
Trong ví dụ trên, độ giật dương không đổi được áp dụng tại thời điểm bắt đầu hoạt động để đạt được sự tăng tốc mượt mà.
Khi trục được chuyển sang chế độ hoạt động tốc độ không đổi, cùng một lượng độ giật âm được áp dụng.
Điều chỉnh độ giật theo cách này đạt được sự tăng tốc/giảm tốc mượt mà đồng thời rút ngắn thời gian đạt được tốc độ mục tiêu.
Tốc độ tạo ra hình dạng đường cong S.
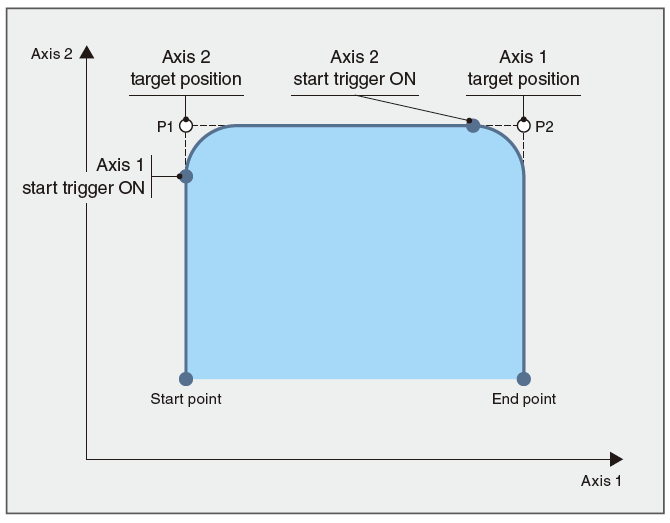
Chuyển động kích hoạt là một loại lệnh trì hoãn việc thực hiện lệnh chuyển động cho đến khi điều kiện kích hoạt được chỉ định được thỏa mãn.
Các trục có thể được khởi động tự động dựa trên các điều kiện được chỉ định bằng cách sử dụng lệnh này, giảm thời gian chu kỳ của các hệ thống băng tải, v.v.
Trong ví dụ hoạt động trên, ngay sau khi trục 2 bắt đầu thực hiện các lệnh chuyển động bình thường, trục 1 thực hiện lệnh chuyển động kích hoạt (trì hoãn việc thực hiện lệnh cho đến khi điều kiện được thỏa mãn).
Khi điều kiện được thỏa mãn (kích hoạt bắt đầu BẬT) trong quá trình hoạt động của trục 2, trục 1 bắt đầu thực hiện lệnh chuyển động.
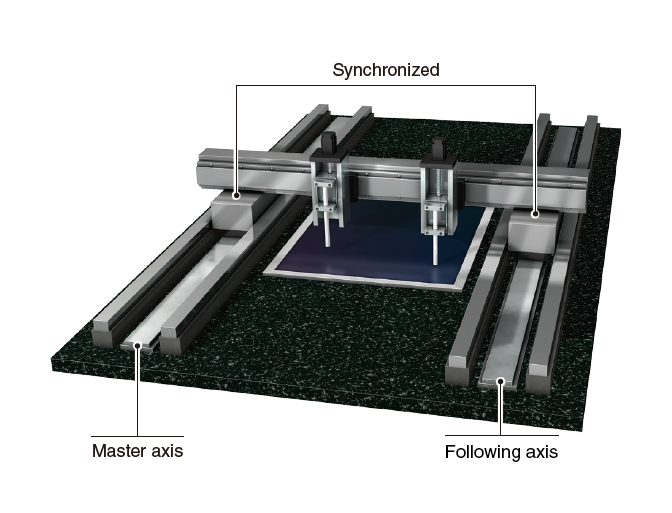
Phần mềm Điều khiển Chuyển động cho phép hoạt động song song, nơi cùng một lệnh có thể được xuất ra cho các trục chính và theo sau.
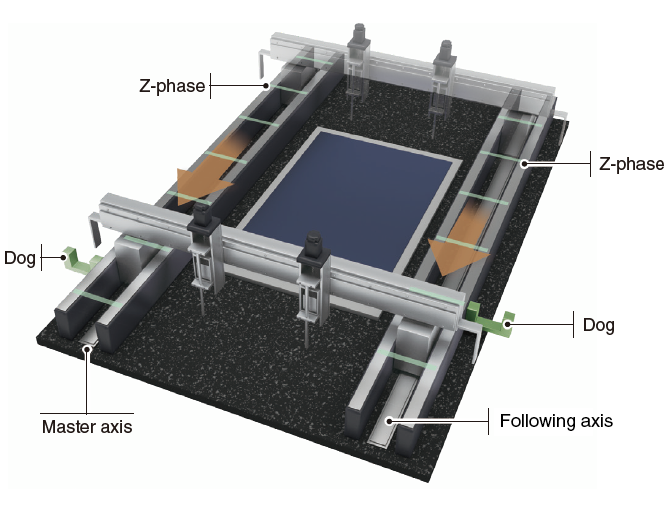
Sau khi các trục chính và theo sau vượt qua các điểm dừng tương ứng của chúng, việc trở về vị trí gốc của cổng dừng cả hai trục tại pha Z của trục chính.
Phương pháp này cho phép hai hoặc nhiều trục thực hiện trở về vị trí gốc đồng thời, hỗ trợ các hệ thống cổng.
Đa dạng các tính năng
Kết nối nóng cho phép thay đổi cấu trúc trong quá trình hoạt động mà không yêu cầu dừng giao tiếp.
Ứng dụng người dùng ngắt kết nối và kết nối lại mạng thông qua thư viện API.
Bộ điều khiển thu thập dữ liệu trạng thái của bộ khuếch đại servo, chẳng hạn như thông tin chẩn đoán máy và nhiệt độ encoder,
thông qua CC-Link IE TSN. Điều này cho phép trực quan hóa trạng thái máy.
Tín hiệu đầu ra được bật khi một điều kiện nhất định được thỏa mãn. Chức năng này có thể được sử dụng như một sự thay thế cho công tắc giới hạn.
Giá trị hiện tại của động cơ servo có thể được đọc khi tín hiệu đầu dò cảm ứng được đưa vào.
Có sẵn đầu dò cảm ứng phần mềm và phần cứng.
Chọn đầu dò cảm ứng theo ứng dụng của bạn.
Độ lệch đã đặt được áp dụng tại các vị trí lệnh cách đều. Lỗi vị trí của vít bi có thể được bù đắp, cải thiện độ chính xác hoạt động.
Độ lệch đã đặt được áp dụng khi trục thay đổi hướng di chuyển.
Lượng lùi của vít bi có thể được bù đắp, điều này cải thiện độ chính xác hoạt động của máy.
Bộ điều khiển cung cấp 24 loại phương pháp gia tốc/giảm tốc, chẳng hạn như hình thang, đường cong S, tỷ lệ giật, parabol, đường cong sin, hình thang gia tốc theo thời gian, v.v.
Chọn phương pháp theo ứng dụng của bạn.
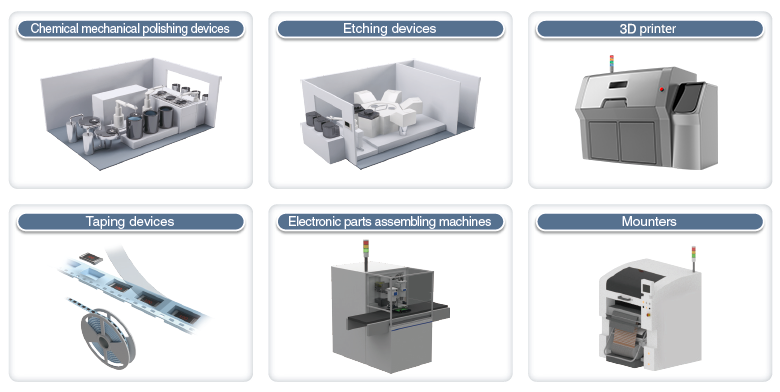
Bao phủ nhiều ứng dụng đa trục
- Phần mềm Điều khiển Chuyển động SWM-G có sẵn trong các mô hình điều khiển từ 16 đến 128 trục, cho phép đồng bộ nhiều trục của các quy mô máy khác nhau.
- Một lõi CPU của máy tính cá nhân công nghiệp được chỉ định để chạy xử lý SWM-G, cho phép SWM-G thực hiện hoạt động thời gian thực với tốc độ cao mà không bị ảnh hưởng bởi hoạt động trên Windows. ® .
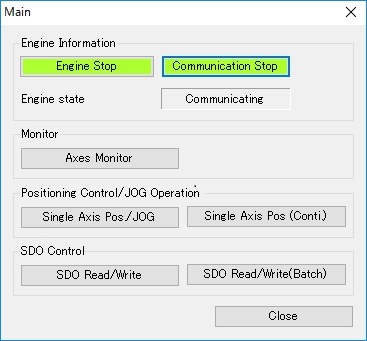
Trạm vận hành công cụ kiểm tra tích hợp SWM-G
Công cụ này cung cấp nhiều tính năng - cài đặt tham số cần thiết cho phát triển ứng dụng và hoạt động kiểm tra cho JOG, inching và các hoạt động định vị. Ngoài ra, trạng thái của từng trục và các dạng sóng mẫu có thể được hiển thị để giúp người dùng kiểm tra thời gian khởi động và mẫu hoạt động.
[Cài đặt tham số]
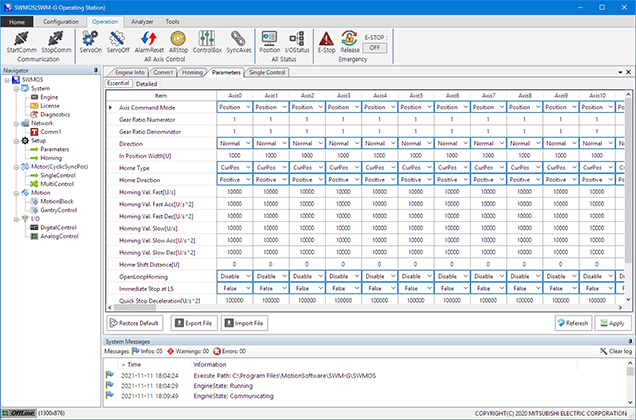
- Cài đặt/kiểm tra tham số của từng trục trong danh sách.
- Nhập/xuất tệp cài đặt từ/đến máy tính cá nhân.
[Cài đặt giao tiếp]
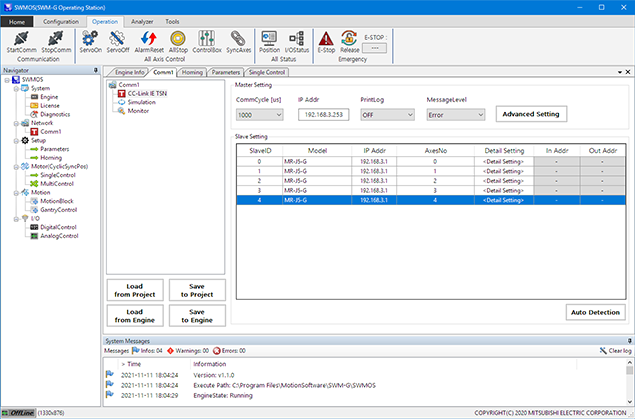
- Thiết lập địa chỉ IP, số trục và chu kỳ truyền thông của các trạm từ xa.
- Nhập/xuất tệp cấu hình từ/đến máy tính cá nhân.
- Các trạm từ xa được thiết lập tự động tùy thuộc vào trạng thái truyền thông.
[Giám sát giao tiếp của trạm chính]
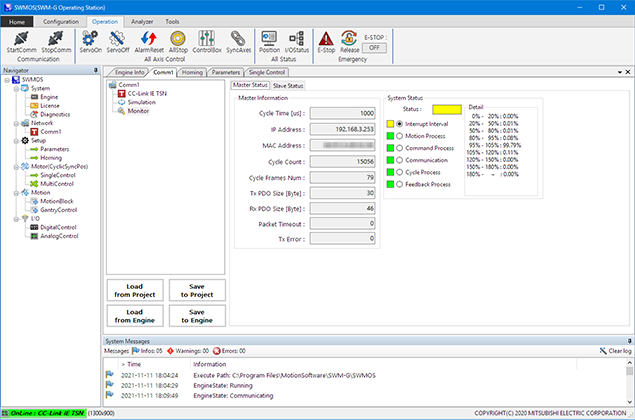
- Giám sát truyền thông hiển thị danh sách cấu hình truyền thông của trạm chính.
- Kiểm tra trạng thái truyền thông trên trạng thái hệ thống.
[Giám sát giao tiếp của các trạm từ xa]
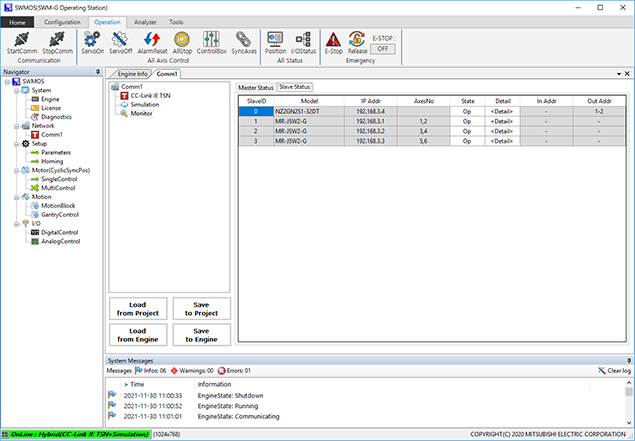
- Kiểm tra trạng thái mạng và địa chỉ IP của các trạm từ xa.
[Chi tiết trạng thái trạm từ xa]
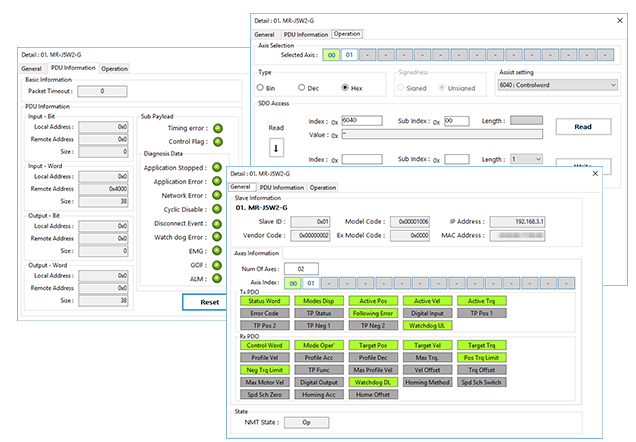
- Kiểm tra chi tiết trạng thái mạng của các trạm từ xa và thực hiện kiểm tra truyền thông.
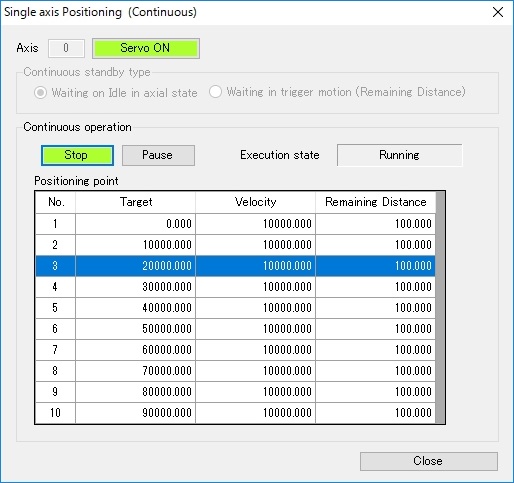
[Kiểm soát trục đơn]
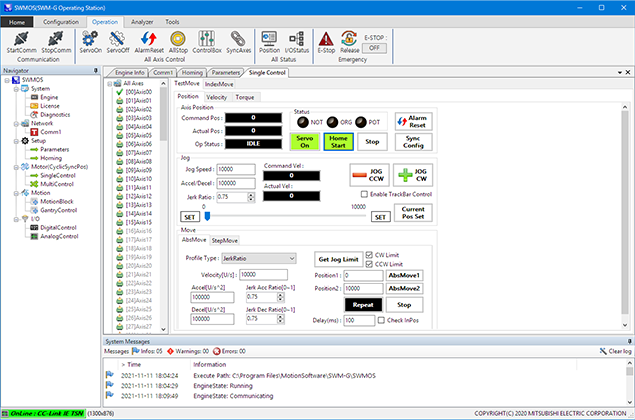
- Thực hiện thao tác kiểm tra cho điều khiển trục đơn.
- Có sẵn thao tác lặp lại, thường được sử dụng cho thao tác kiểm tra.
Cài đặt và điều chỉnh nhiều bộ khuếch đại servo
MR Configurator2 cho phép người dùng dễ dàng cài đặt và điều chỉnh nhiều bộ khuếch đại servo thông qua CC-Link IE TSN, cho phép kết hợp giao tiếp TCP/IP và các giao tiếp khác.
Sử dụng MR Configurator2 với công cụ kiểm tra tích hợp, người dùng có thể điều chỉnh bộ khuếch đại servo trong khi kiểm tra trạng thái giao tiếp của bộ khuếch đại servo.
- Hỗ trợ MR-J5-G
- Quản lý hệ thống nhiều trục như một dự án.
- Các tham số và chẩn đoán máy có thể được thiết lập cho tất cả các trục trong một lô trên MR Configurator2.

* MR Configurator2 không được bao gồm trong phần mềm điều khiển chuyển động SWM-G.
Bản dùng thử SWM-G-W
Sử dụng phiên bản dùng thử miễn phí SWM-G-W mà không cần USB Key (Giấy phép)
SWM-G-W là phiên bản dùng thử miễn phí có thể sử dụng không giới hạn thời gian mà không cần khóa USB (giấy phép). Trục mô phỏng có thể được vận hành, và các chương trình đã tạo có thể được sử dụng trên SWM-G/SWM-G-N1. Phần mềm này hoạt động trên hệ điều hành Windows. ® và không chiếm dụng lõi CPU.
| Phiên bản dùng thử miễn phí SWM-G-W | SWM-G(-N1) | |
|---|---|---|
| Khóa USB (giấy phép) | Không yêu cầu | Yêu cầu |
| RTX | - | Bao gồm |
| Số trục điều khiển tối đa | 64 trục | 128 trục |
| Bộ khuếch đại servo | - | MR-J5-G(-N1) |
| Trục mô phỏng | Bao gồm | Bao gồm |
Điều khiển chuyển động với các trục mô phỏng
Các chương trình có thể được kiểm tra với các trục mô phỏng.
Điều này cho phép kiểm tra chương trình mà không cần bộ khuếch đại servo từ giai đoạn gỡ lỗi, rút ngắn thời gian khởi động.

Chương trình mẫu
Công cụ này cung cấp nhiều tính năng - cài đặt tham số cần thiết cho phát triển ứng dụng và hoạt động kiểm tra cho JOG, inching và các hoạt động định vị. Ngoài ra, trạng thái của từng trục và các dạng sóng mẫu có thể được hiển thị để giúp người dùng kiểm tra thời gian khởi động và mẫu hoạt động.
Thư viện mẫu
Thư viện API cho phần mềm điều khiển chuyển động SWM-G.
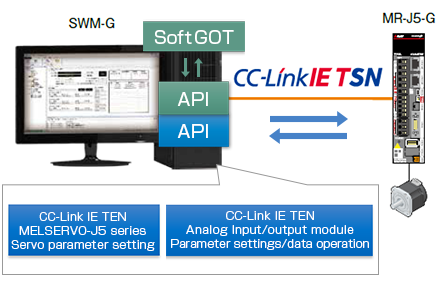
- ■Thư viện API Liên kết với SoftGOT.
-
- Thư viện API cho phép người dùng dễ dàng trao đổi dữ liệu của Phần mềm Điều khiển Chuyển động SWM-G và SoftGOT2000.
- ■Thư viện API Liên kết với các sản phẩm Mitsubishi Electric.
-
- Thư viện API cho phép người dùng thiết lập tham số cho các mô-đun I/O tương tự tương thích với CC-Link IE TSN và bộ khuếch đại servo
(Dòng MELSERVO-J5).
- Thư viện API cho phép người dùng thiết lập tham số cho các mô-đun I/O tương tự tương thích với CC-Link IE TSN và bộ khuếch đại servo
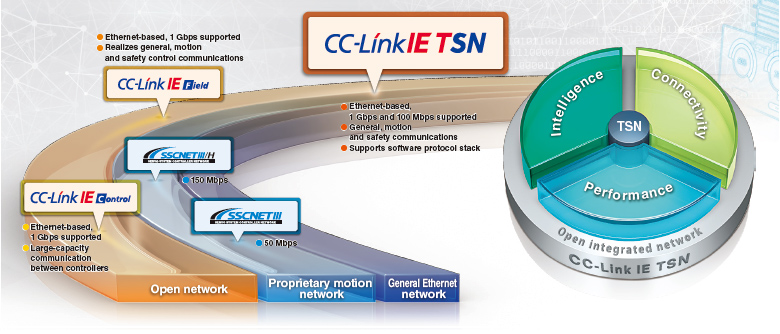
Mạng lưới tích hợp mở trong toàn bộ doanh nghiệp sản xuất
CC-Link IE TSN hỗ trợ giao tiếp TCP/IP và áp dụng nó vào các kiến trúc công nghiệp thông qua việc hỗ trợ TSN cho phép giao tiếp thời gian thực.
Với kiến trúc hệ thống linh hoạt và các tính năng thiết lập và khắc phục sự cố phong phú, CC-Link IE TSN là lựa chọn lý tưởng để xây dựng cơ sở hạ tầng IIoT trong toàn bộ doanh nghiệp sản xuất.
- * TSN: Mạng nhạy cảm về thời gian
- * IIoT: Internet vạn vật trong công nghiệp

Bộ khuếch đại Servo MELSERVO-J5/MELSERVO-JET

Dòng MELSERVO-J5, bộ khuếch đại servo hiệu suất cao hàng đầu trong ngành, được trang bị bộ điều khiển độc đáo mạnh mẽ hơn bao giờ hết.
Các bộ khuếch đại servo này có thể kết nối với CC-Link IE TSN để thực hiện kiểm soát tốc độ cao, độ chính xác cao.
Mỗi bộ khuếch đại servo đa trục điều khiển tối đa hai hoặc ba động cơ servo (tùy thuộc vào mô hình bộ khuếch đại servo được chọn), đơn giản hóa việc đi dây và cho phép một máy nhỏ gọn với chi phí thấp hơn.


Dòng bộ khuếch đại servo hiệu suất cao MELSERVO-JET có một động cơ điều khiển độc đáo mạnh mẽ hơn bao giờ hết.
Các bộ khuếch đại servo này có thể kết nối với CC-Link IE TSN để thực hiện kiểm soát tốc độ cao, độ chính xác cao.
Các bộ khuếch đại servo hỗ trợ động cơ servo tuyến tính bên cạnh các động cơ quay.
EtherCAT ® được hỗ trợ bởi MR-JET-G-N1.
Thông số kỹ thuật
| Phần mềm điều khiển thiết bị truyền động | |||||
|---|---|---|---|---|---|
| SWM-G(-N1) *3 | |||||
| Số trục điều khiển tối đa *1 | 16 trục, 32 trục, 64 trục, 128 trục | ||||
| Chu kỳ truyền thông (cài đặt chu kỳ hoạt động) [μs] |
125, 250, 500, 1000, 2000, 4000, 8000 | ||||
| Mạng truyền thông công nghiệp | CC-Link IE TSN, EtherCAT ® *3 | ||||
| Lớp CC-Link IE TSN | B | ||||
| Thông số kỹ thuật truyền thông | Hỗn hợp kết nối nóng, truyền thông SDO, truyền thông TCP/IP | ||||
| Môi trường phát triển | • Microsoft ® Visual Studio ® 2017, 2019, 2022 • Programming languages supported by API library: C/C++, .NET (C#, VB.NET, etc.) |
||||
| Chức năng | Phương pháp điều khiển | Vị trí, tốc độ, mô-men xoắn | |||
| Định vị | Tối đa 128 trục đồng thời (lệnh giá trị tuyệt đối, lệnh giá trị tương đối), ghi đè | ||||
| Gia tốc/giảm tốc xử lý |
Hình thang, đường cong S, tỷ lệ giật, parabol, sin, gia tốc thời gian hình thang, v.v. (24 loại) |
||||
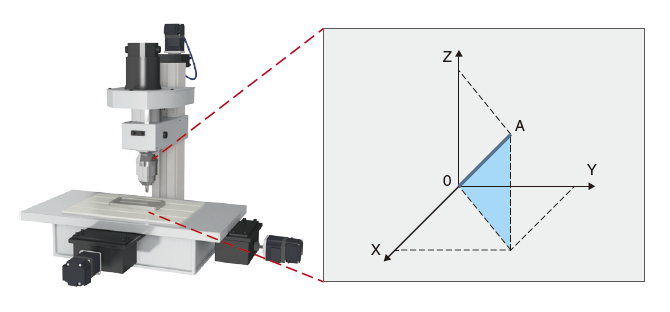
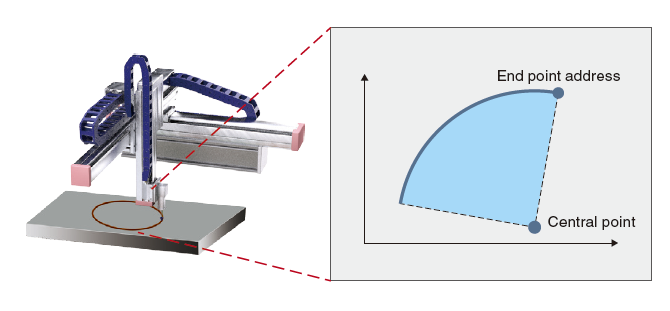
| Nội suy | Nội suy tuyến tính 2 đến 4 trục, nội suy tròn 2 trục/3 trục, nội suy xoắn 3 trục, PVT | ||||
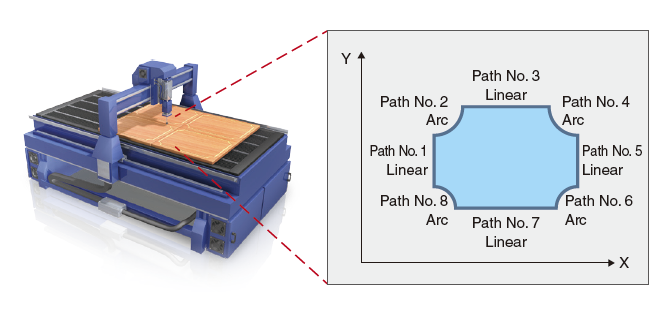
| Đường đi liên tục | Kết hợp nội suy tuyến tính và tròn, nội suy spline, điều khiển tốc độ tự động đọc trước, đường đi liên tục tuyến tính/tròn với giai đoạn quay | ||||
| Hoạt động JOG | Được cung cấp | ||||
| Điều khiển thời gian thực | Sự kiện, chuyển động kích hoạt, đầu ra đồng bộ vị trí | ||||
| Kiểm soát đồng bộ | Đồng bộ đơn giản, tỷ lệ bánh răng đồng bộ, độ lệch pha đồng bộ, bù đồng bộ, thiết lập/hủy bỏ đồng bộ động, nhiều cặp (tối đa 64 cặp) đồng bộ giữa 1 trục và nhiều trục (nhóm đồng bộ) |
||||
| Cam điện tử | Đường cong cam của tám hệ thống có thể được xác định, đường cong cam theo chu kỳ truyền thông, hoạt động pha, ly hợp |
||||
| Trở về vị trí gốc *2 | Trở về vị trí gốc sử dụng pha Z, cảm biến vị trí gốc, cảm biến giới hạn, cảm biến tiệm cận giới hạn cảm biến, tín hiệu đầu vào bên ngoài, kết thúc cơ khí, và trục cổng có thể được thực hiện. |
||||
| Kích thước I/O | Đầu vào: 8000 byte, đầu ra: 8000 byte | ||||
| Chức năng bù | Bù sai số lùi/sai số bước, bù biến dạng mặt phẳng (độ thẳng) | ||||
| Chức năng bổ sung | Cảm biến chạm, ghi lại | ||||
- *1. Số lượng trục điều khiển tối đa khác nhau giữa các khóa USB cho Phần mềm Điều khiển Chuyển động.
- *2. SWM-G không hỗ trợ chế độ trở về vị trí gốc của bộ khuếch đại servo.
- *3. SWM-G-N1 cũng tương thích với EtherCAT. ® .