MELSOFT RT ToolBox3 Phần mềm kỹ thuật Robot (MELFA)

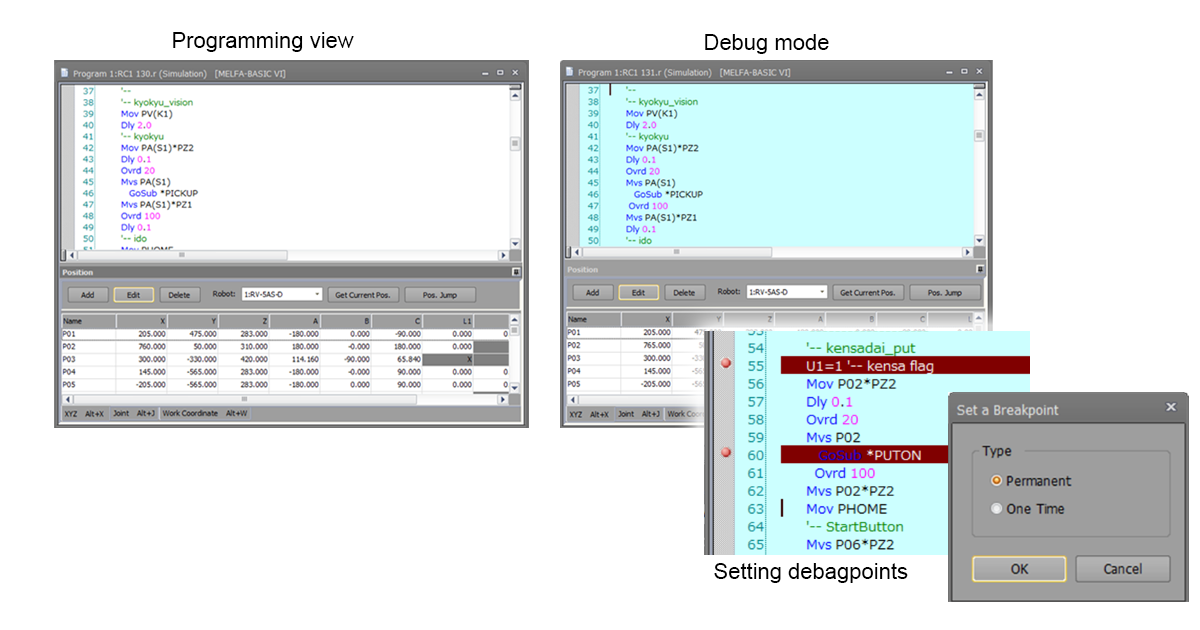
Chức năng chỉnh sửa và gỡ lỗi chương trình
- Các chương trình có thể được chỉnh sửa bằng cách sử dụng MELFA-BASIC IV, V và VI. (thay đổi tùy theo mô hình).
- Cải thiện các hoạt động làm việc bằng định dạng đa cửa sổ và các chức năng chỉnh sửa khác nhau.
- Điều này hữu ích cho việc kiểm tra các hoạt động như thực hiện các bước chương trình, thiết lập các cài đặt điểm dừng và các nhiệm vụ khác.
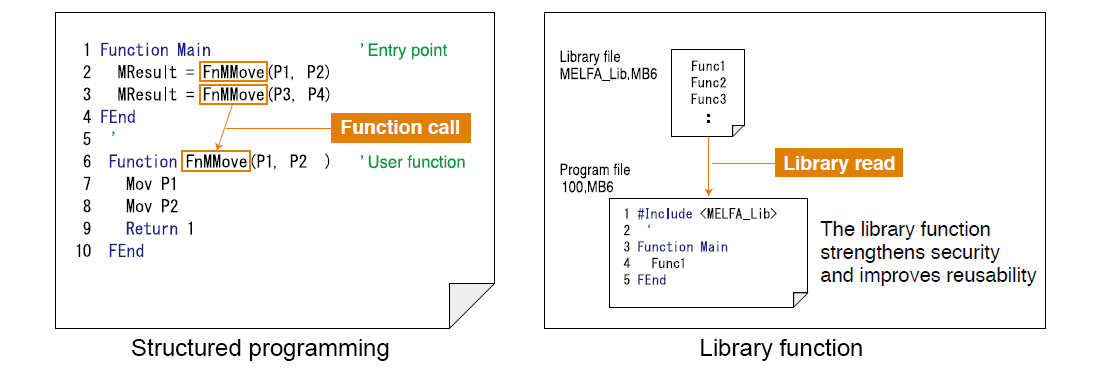
MELFA-BASIC VI
Ngoài việc cung cấp một bộ lệnh hoàn chỉnh hơn, điều này sử dụng lập trình có cấu trúc để mang lại mức độ tái sử dụng và khả năng đọc cao.
- Cho phép các chương trình có cấu trúc, cho phép lập trình với mức độ tái sử dụng và khả năng đọc cao.
- Việc duy trì một thư viện xử lý chương trình cho phép tích lũy kiến thức và cung cấp khả năng tái sử dụng tốt hơn. Các thư viện cũng có thể được ẩn để ngăn chặn việc tiết lộ kiến thức.
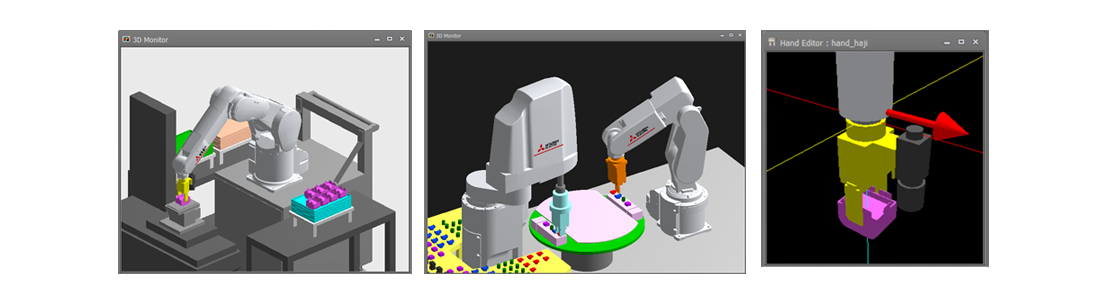
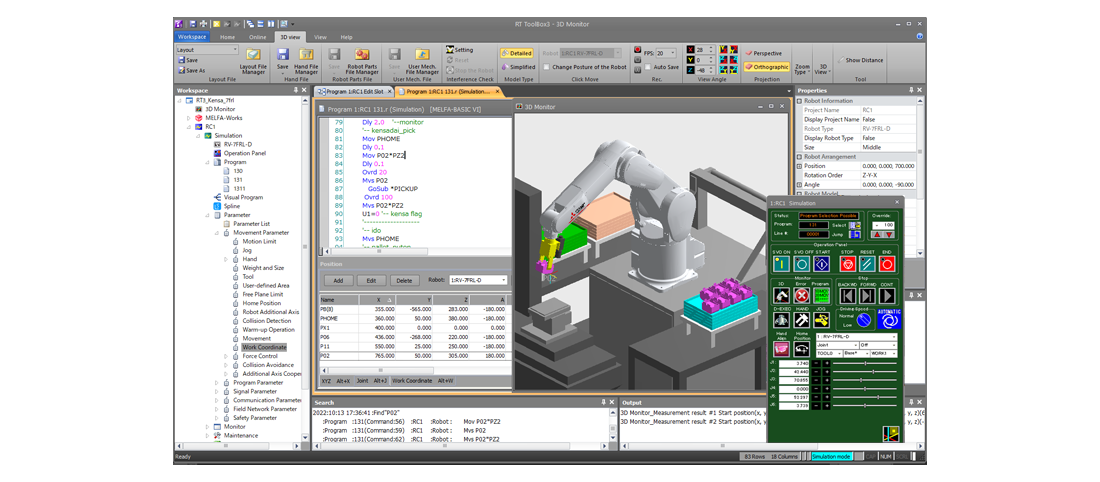
Trình xem 3D
- Trình xem 3D cho phép xác minh dễ dàng các tư thế và chuyển động của robot, xác minh các giá trị giới hạn của các tham số do người dùng định nghĩa, và đặt ảo các thiết bị ngoại vi bằng các đối tượng cơ bản.
- Nó cũng có thể được sử dụng để kiểm tra sự can thiệp giữa robot và các thiết bị ngoại vi.
Chức năng mô phỏng
Các chương trình robot, bao gồm tín hiệu I/O, có thể được mô phỏng trên máy tính, các chuyển động có thể được xác minh, và thời gian chu kỳ của các hoạt động robot cũng có thể được đo. Điều này có nghĩa là các hoạt động của hệ thống thực tế có thể được tái hiện như chúng vốn có. Các chức năng mô phỏng như vậy cũng hiệu quả cho các kiểm tra hệ thống sơ bộ.
- Tối đa 8 robot có thể được vận hành, và các chuyển động phối hợp giữa các robot có thể được xác minh.
- Các mô phỏng servo cũng có thể được thực hiện, để kiểm tra sơ bộ các tải.
- Các tín hiệu có thể được phối hợp với GX works2 và GX works3 để dễ dàng tạo ra các mô phỏng dây chuyền.
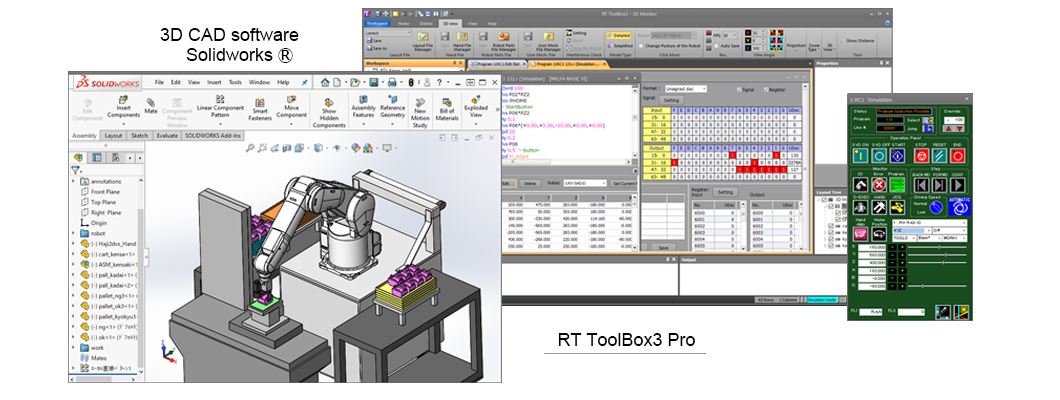
Chức năng MELFA-Works
Chức năng MELFA Works có thể được sử dụng trong RT ToolBox3 Pro. MELFA Works, một công cụ bổ sung của SolidWorks®, có thể mô phỏng các hệ thống sản xuất robot trên SolidWorks® và xuất dữ liệu của các đường đi xử lý trên các chi tiết công việc.*1)
*1) SolidWorks® là thương hiệu đã đăng ký của SolidWorks Corp, (Mỹ). Một công cụ bổ sung là một chương trình phần mềm thêm một số chức năng nhất định vào các gói phần mềm ứng dụng.
Chức năng chính
- Mô phỏng các hoạt động robot
Các chương trình robot, bao gồm tín hiệu I/O, có thể được mô phỏng trên SolidWorks®. Tức là, các hoạt động của hệ thống thực tế có thể được tái hiện như chúng vốn có. - Thời gian chu kỳ
Thời gian chu kỳ của các hoạt động robot có thể được đo. - Kiểm tra sự can thiệp
Sự can thiệp giữa robot và các thiết bị ngoại vi có thể được kiểm tra. - Liên kết CAD
Dữ liệu công việc để thực hiện các thao tác niêm phong và các nhiệm vụ khác yêu cầu nhiều bước dạy có thể dễ dàng được tạo ra bằng cách chọn khu vực xử lý trên dữ liệu CAD 3D. Vì dữ liệu công việc được tạo ra từ dữ liệu CAD 3D, ngay cả các đường cong 3D phức tạp cũng có thể được tạo ra. - Hiệu chuẩn
Dữ liệu chuỗi điểm của tọa độ CAD được tạo ra bằng cách sử dụng liên kết CAD được chỉnh sửa thành dữ liệu tọa độ robot, và chương trình vận hành cùng dữ liệu chuỗi điểm được gửi đến robot.
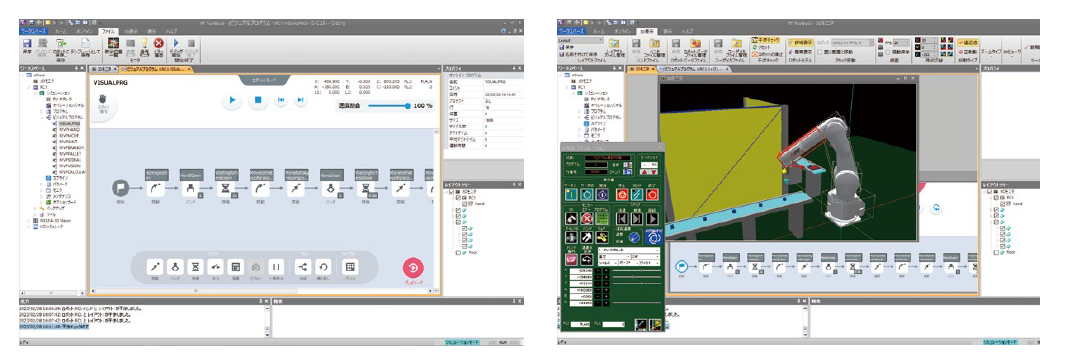
Lập trình trực quan
RT ToolBox3 bao gồm chức năng lập trình trực quan của RT VisualBox, cho phép thực hiện các thao tác trực quan. Việc khởi động robot trở nên dễ dàng ngay cả khi không có kiến thức về robot. Nó cũng hỗ trợ mô phỏng, cho phép bạn thực hiện xác nhận chuyển động và kiểm tra sự can thiệp của các chương trình được tạo ra bằng lập trình trực quan trên một bố cục 3D.
- Việc khởi động robot rất dễ dàng ngay cả khi không có kiến thức về robot.
- Nó cũng hỗ trợ mô phỏng, cho phép bạn thực hiện xác nhận chuyển động và kiểm tra sự can thiệp của các chương trình được tạo ra bằng lập trình trực quan trên một bố cục 3D.