Giải pháp
Điện và Điện tử

Lắp ráp chính xác các bộ phận (bộ nhớ) thông qua
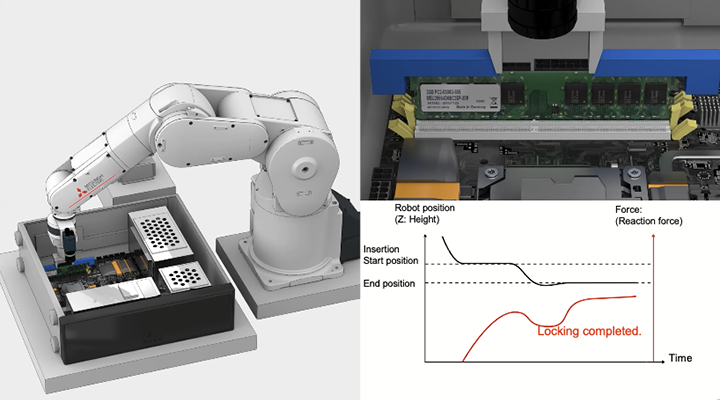
Một robot thực hiện việc tháo lắp thẻ nhớ. Cảm biến lực được sử dụng để cảm nhận áp suất, phát hiện bất thường và hoàn thành lắp ráp.
Ví dụ lắp ráp thẻ nhớ

Giải pháp cho các vấn đề
Vấn đề
Nhu cầu tự động hóa không bị ảnh hưởng bởi sai lệch trong độ chính xác gia công linh kiện (kích thước) và độ chính xác lắp ráp của các công đoạn trước đang ngày càng tăng.
Đối với các quy trình yêu cầu lắp ráp chính xác đồng thời bảo vệ linh kiện, đôi khi cần duy trì lực ép cố định trong một khoảng thời gian nhất định, và trong một số trường hợp cần ghi lại dữ liệu ép để quản lý.
Giải pháp
- Robot trích xuất bộ nhớ.
- Cảm biến hình ảnh kiểm tra vị trí của chi tiết gia công.
- Robot tính toán vị trí làm việc bên trong bằng cách sử dụng các phương pháp tính toán vector và di chuyển bộ nhớ gần với vị trí cần bù đắp
- Bộ nhớ được chèn vào khe cắm trên bảng mạch (kiểm soát hồ sơ). Trong thời gian này, cảm biến lực phát hiện sự hiện diện/không hiện diện của bất thường và hoàn thành lắp ráp.
Điểm
- 【Giảm thiểu tổn thất sản phẩm/linh kiện】
- Cảm biến lực phát hiện và ngăn chặn hư hại cho chi tiết gia công, v.v. trong quá trình lắp ráp.
- 【Quản lý truy xuất nguồn gốc】
- Dữ liệu lực trong quá trình lắp ráp được thu thập theo thời gian thực. Dữ liệu có thể được sử dụng cho kiểm soát chất lượng.
- 【Điều chỉnh vị trí tự động】
- Cảm biến lực và cảm biến hình ảnh bù đắp cho sự biến đổi trong độ chính xác gia công chi tiết hoặc vị trí đã thiết lập, góp phần vào việc vận hành thiết bị ổn định.
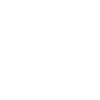
Khi xảy ra sự bất thường do định hướng chi tiết công việc.
Chi tiết gia công được đặt với mặt trước và mặt sau bị đảo ngược. Cảm biến lực phát hiện sự bất thường về áp suất trong quá trình lắp đặt. Hoạt động được dừng lại trước khi chi tiết gia công bị hư hại.
Dòng sản phẩm



Ứng dụng




Câu chuyện của chúng tôi
