Product Features

Intelligent technology
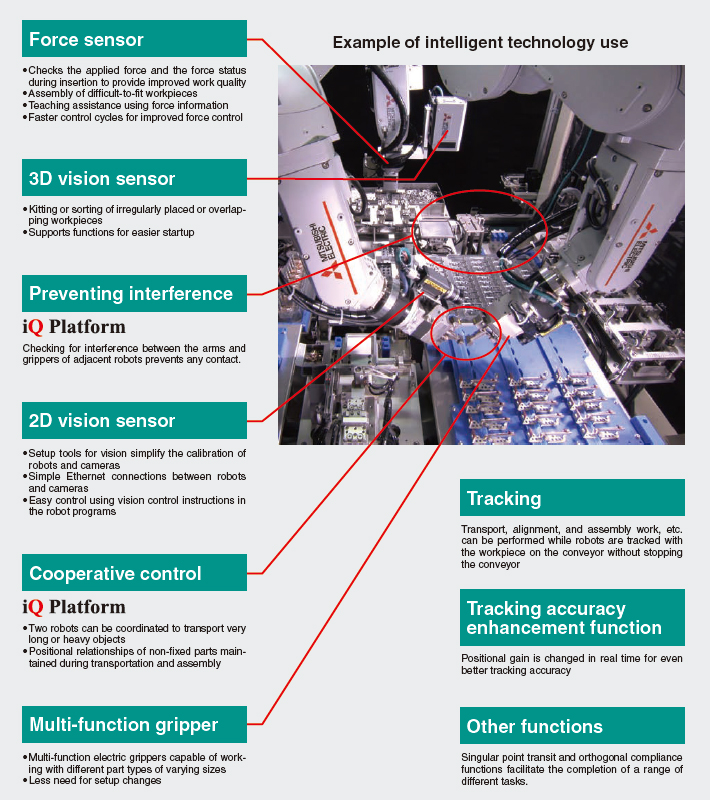
Enhanced cooperation with vision sensors and more advanced force sensors allow more advanced tasks to be accomplished at higher speeds and with greater precision.
Through the use of highly accurate vision sensors and force sensors that control the levels of force applied by robots, it is now possible to automate extremely difficult tasks that have been beyond the scope of automation in the past.
-
Please refer to the "Catalogs" for a robot and the details of the robot arm options.
Force sensor
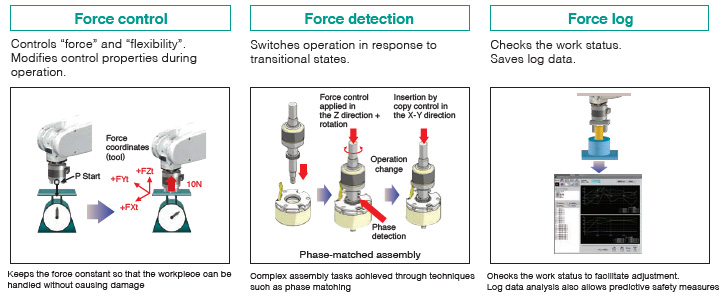
| More accurate force sensor | Advances in force sensors allow faster and more accurate testing. Control performance is 8 times better than current levels. Force data can be acquired every 0.888ms. |
|---|---|
| Gravitational offset cancellation | Compensates for gravity in response to changes in force on the force sensor in the X, Y and Z directions when the attitude changes. Force control can be exercised correctly even when the attitude changes. |
| Teaching work assistance (Force GUI included) |
|
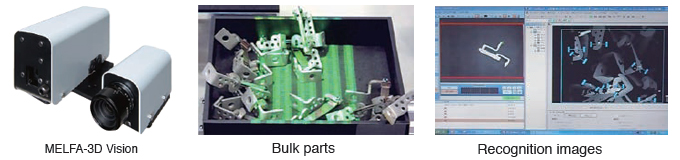
3D vision sensor
The 3D vision sensors allow bulk feeding without the use of special trays or parts feeders.It reduces the amount of part feeding work.
| Enables bulk feeding | Because the sensors allow bulk feeding without the use of special trays or parts feeders, it reduces the amount of part feeding work. |
|---|---|
| High-speed picking using original technology | Shortens the image recognition time with high-speed recognition technology. Either the model-less recognition or the model-matching recognition method can be selected to suit the application. |
| Recognition parameter automatic adjustment AI (MELFA Smart Plus) |
AI technology and simulation technology automate the sensor parameter adjustment work.(Compatible only with model-less recognition) |
| Lightweight and compact for diverse installation | Compact and lightweight sensor section enables installation on robot hand. Both eye-in-hand and fixed installation applications are supported. The work distance and range of view can be changed flexibly by using the enclosed base set or extended option vision |
| Adjustment assistance function | Features functions to compensate for lens distortion and for the aperture size and focusing during focus and aperture adjustment. This makes adjustment easier. |
| Workpiece supply assistance function | The function to estimate the remaining bulk workpiece level allows the operator to understand the timing to load supplied parts. |
2D vision sensor
MELSENSOR

- The robot and camera can be calibrated through a simple process using vision sensor setting tools.
- Simple connection between the robot and camera using Ethernet.
- Three robots connected to a single vision sensor/Seven vision sensors connected to a single robot. Enables costs to be reduced even for complicated system configurations.
Multi-function electric gripper
High-functioning operation control not possible using air cylinders.
Multi-function electric grippers capable of working with different part types of varying sizes.

- The gripping force and speed can be specified to suit the target, whether it's a heavy object or involves delicate work.
- Even when handling multiple workpieces of varying sizes, the operating positions can be specified so that the optimum stroke is configured.
- Product inspections can be informed by positional feedback from the gripper, such as whether gripping was successful or whether workpiece measurements indicate that itis acceptable.
Interference prevention function(iQ Platform)
Checking for interference between the arms and grippers of adjacent robots prevents any contact.
Automatically prevents collisions between robots
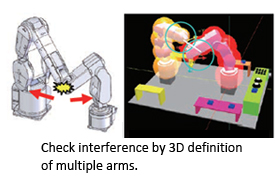
- Unanticipated interference can be prevented during jogging or automatic operation because collisions between robots are detected in advance and robot movement is stopped.
- The number of recovery processes following collisions due to missed interlocks or teaching errors can be reduced.
Cooperative control(iQ Platform)
Two robots can be coordinated to transport very long or heavy objects
Cooperative control using multiple arms, Coordinated transportation
- Cooperative control between multiple robots is enabled through CPU connection between the robots. Normal operation is through individual robot operation, making operation simple.
- Long or flexible objects can be transported using multiple small robots instead of larger robots.