Motion module Fitur (Mode FB Kontrol Gerak PLCopen®)

- Rangkaian produk
- Sinkronisasi Antar-Modul
- Metode Akselerasi/Deselerasi
- Kontrol Sinkron
- Fungsi Probe Sentuh
- Sistem Servo Perekam
- Fungsi Komunikasi Keamanan CC-Link IE TSN
- Lingkungan Teknik
- GX LogViewer
- Pra-Verifikasi dan Pemecahan Masalah yang Mudah
- Fungsi Autentikasi Kunci Keamanan
- Panduan Memulai Cepat
- Daftar Fungsi
- Tautan Terkait


- ●Modul Motion diprogram dalam bahasa ST. CPU PLC menggunakan bahasa ladder, FBD/LD, dan ST.
- ●Pustaka PLCopen® Motion Control FB, yang sesuai dengan standar internasional, tersedia untuk pemrograman.
- ●Pengguna dapat menganalisis status operasi dengan mencatat data pada GX LogViewer, yang meningkatkan efisiensi debug.
[Contoh pemrograman dengan CPU PLC
(Pemrograman hanya dengan CPU PLC)]
![[An example of programming by PLC CPU (Programming by PLC CPU only) ]](./assets/img/feat_fb-01.png)
Program CPU PLC memulai pengoperasian modul Gerak, menghilangkan kebutuhan pengguna untuk membuat program lain untuk modul Gerak, sehingga mengurangi beban pemrograman.
[Contoh pemrograman oleh setiap modul
(Pemrograman oleh CPU PLC dan modul Gerak)]
![[An example of programming by each module (Programming by PLC CPU and Motion modules) ]](./assets/img/feat_fb-02.png)
Modul gerak dapat menjalankan operasi sebagai pengganti CPU PLC. Ini mengurangi operasi.
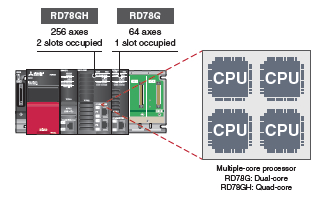
Rangkaian produk

RD78GHV
RD78GHW
- Jumlah maksimum sumbu kontrol:
RD78GHV: 128 sumbu/modul
RD78GHW: 256 sumbu/modul - Siklus operasi minimum *1:
31,25 [μs] - Kapasitas program bahasa ST:
ROM internal maks. 64 MB + kartu memori SD
*1.Siklus operasi bervariasi menurut jumlah sumbu kontrol dan model.

RD78G4/RD78G8
RD78G16/RD78G32
RD78G64
- Jumlah maksimum sumbu kontrol:
RD78G64: 64 sumbu/modul - Siklus operasi minimum *1: 62,5 [μs]
- Kapasitas program bahasa ST:
ROM internal maks. 16 MB
+ kartu memori SD
*1.Siklus operasi bervariasi menurut jumlah sumbu kontrol dan model.
Peningkatan Kinerja
Siklus operasi minimum RD78GH dalam mode kontrol gerak PLCopen® FB kira-kira 4,1 hingga 6,2 kali lebih cepat daripada model sebelumnya, dan jumlah sumbu kontrol maksimum 4 hingga 8 kali lebih banyak. Data dari penguat servo dan sinyal input/output dapat diterima pada kecepatan tinggi, yang mengurangi waktu siklus.
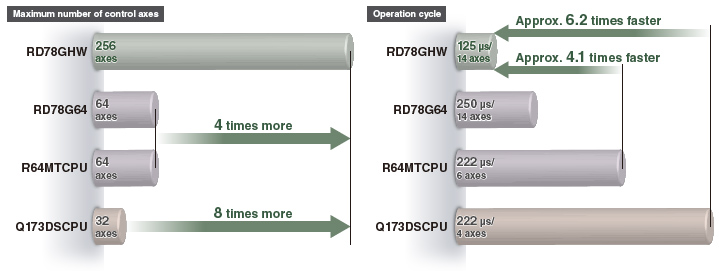



*1.Nilai ini berlaku saat RD78GH digunakan.
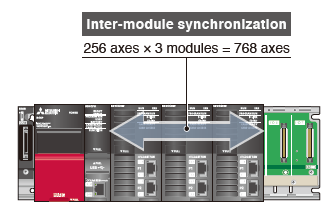
Sinkronisasi Antar Modul
Fungsi sinkronisasi antar-modul dapat menyinkronkan pengaturan waktu kontrol di antara beberapa modul Motion pada unit dasar yang sama.
- Mesin dapat disinkronkan melalui fungsi ini saat setiap mesin menggunakan modul Motion.
Metode Akselerasi/Deselerasi
Tersedia tiga jenis metode percepatan/perlambatan: percepatan/perlambatan trapesium, percepatan/perlambatan sentakan, dan waktu percepatan/perlambatan tetap.
Percepatan/perlambatan trapesium
Setelah memulai, percepatan maksimum dipertahankan hingga kecepatan target tercapai.
Misalnya, ketika kendaraan yang membawa benda kerja berakselerasi secara tiba-tiba, benda kerja akan berayun maju mundur karena dampak dari percepatan yang tiba-tiba tersebut.
Untuk mengurangi dampak dan getaran dalam kasus seperti ini, kendaraan harus berakselerasi dengan kecepatan yang lebih lambat.
Kecepatan tersebut menciptakan bentuk trapesium.
Percepatan/perlambatan sentakan
Percepatan berubah secara bertahap.
Misalnya, ketika kendaraan yang membawa benda kerja berakselerasi secara bertahap, beban tidak akan berayun maju mundur setelah akselerasi.
Sentakan dipertahankan selama akselerasi.
Ketika kendaraan hampir mencapai kecepatan target, sentakan diperlambat. Menyesuaikan sentakan dengan cara ini menghasilkan akselerasi/perlambatan yang halus sekaligus memperpendek waktu yang dibutuhkan untuk mencapai kecepatan target.
Kecepatan menciptakan bentuk kurva-S.
Metode waktu percepatan/perlambatan tetap
Metode ini menjalankan percepatan/perlambatan berdasarkan waktu yang ditentukan, terlepas dari kecepatan yang diperintahkan.
- *1.Masukkan percepatan.
- *2.Tentukan waktu percepatan.
Kontrol Sinkron
Kontrol sinkron dilakukan menggunakan blok fungsi yang beroperasi sebagai modul mekanis berbasis perangkat lunak seperti roda gigi, poros, roda gigi pengubah kecepatan, dan cam.
- Penempatan dan kontrol sinkron dapat dilakukan bersamaan dalam program yang sama.
- Kontrol sinkron menggunakan encoder sinkron sebagai sumbu input juga dimungkinkan.
- Sumbu output dioperasikan berdasarkan data cam (profil operasi).
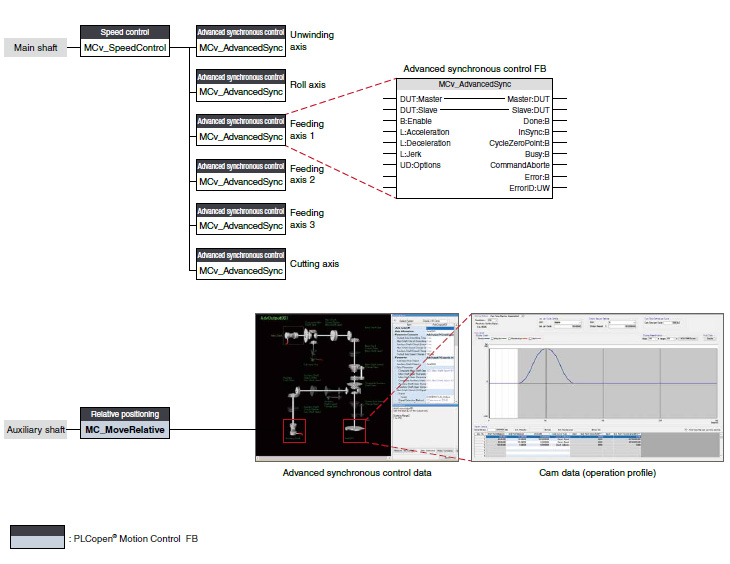
Menggabungkan FB Kontrol Sinkron Secara Fleksibel
Jumlah dan kombinasi modul sinkron dipilih secara fleksibel, sehingga mencapai hasil yang optimal operasi.
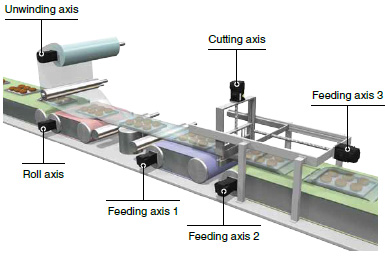
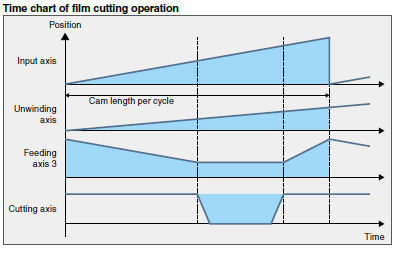
Mesin pengepakan
Aplikasi ini menyinkronkan semua sumbu,
dari sumbu pemotongan hingga sumbu pelepasan, dengan sumbu utama.
Operasi pemotongan dilakukan dengan sumbu pemotongan dan sumbu pemasukan 3.
Pengaturan FB Kontrol Sinkron Lanjutan dengan Antarmuka Berbasis Grafis
Kontrol sinkron dapat dengan mudah dijalankan dengan mengatur modul sinkron dengan parameter dan memulai FB kontrol sinkron lanjutan. Modul sinkron seperti poros bantu, roda gigi, kopling, dan roda gigi pengubah kecepatan dapat diatur dengan antarmuka berbasis grafis.
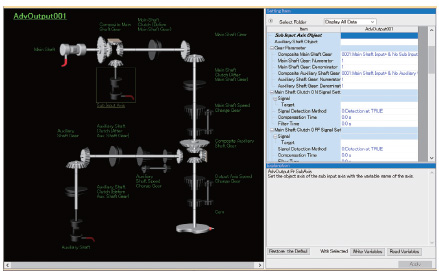
Data kontrol sinkron tingkat lanjut
Gambar modul sinkron yang diaktifkan disorot, memungkinkan verifikasi data yang ditetapkan melalui visualisasi.
- Data sumbu input
- Parameter sinkron (sumbu output)
- Data poros bantu
- Data kopling
- Data roda gigi
- Data roda gigi perubahan kecepatan
- Data cam (profil operasi)
- Jenis bentuk gelombang cam
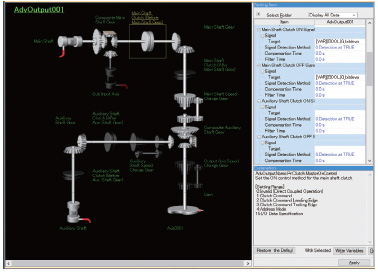
Kopling
Kopling digunakan untuk mengirimkan/melepas pulsa perintah dari sisi masukan poros utama/tambahan dengan cara menghidupkan/mematikan kopling, yang mengendalikan pengoperasian/penghentian poros keluaran.
Kopling dapat diatur ke kopling poros utama dan kopling poros tambahan.
| Clutch ON control mode | Clutch OFF control mode |
|---|---|
| Invalid (Direct coupled operation) |
Invalid (OFF control invalid) |
| Clutch command | Clutch command (One-shot operation) |
| Clutch command leading edge | Clutch command leading edge |
| Clutch command trailing edge | Clutch command trailing edge |
| Address mode | Address mode |
| I/O data specification | I/O data specification |
Kopling dapat digunakan melalui kontrol sinkron canggih FB.3
Data kontrol sinkron tingkat lanjut
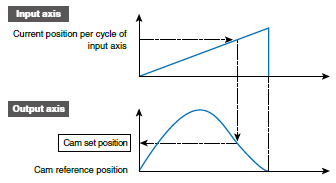
Memulai ulang kontrol sinkron
Jika posisi sinkron menjadi tidak selaras karena penghentian darurat, dsb., kontrol sinkron dapat dimulai ulang dengan menggunakan mode analisis kontrol sinkron.
Dalam mode analisis kontrol sinkron, posisi cam set diperbarui berdasarkan sumbu input. Posisi sinkron dapat disejajarkan menggunakan posisi cam set yang diperbarui sebelum memulai kontrol sinkron.
Encoder Sinkron
Modul Gerak dengan mudah menjalankan kontrol sinkron dengan menyetel encoder sinkron ke "Sumbu encoder riil" dan membuat program dengan blok fungsi.
Jumlah pulsa perintah dapat disesuaikan menggunakan blok fungsi (MC_Gearin) atau parameter.
Encoder sinkron inkremental *1dapat dihubungkan melalui penguat servo.
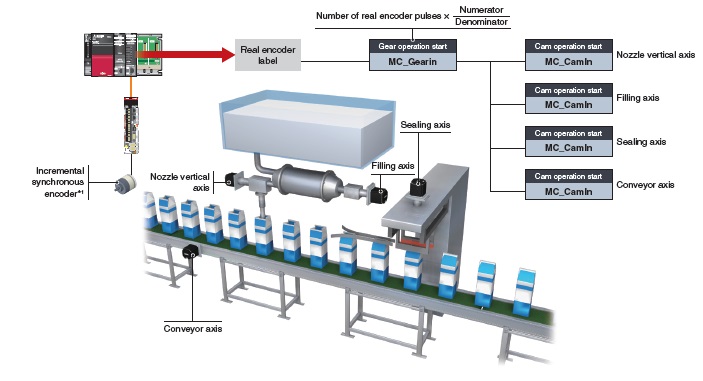
- *1.Didukung oleh seri MELSERVO-J5.
Saat menghubungkan enkoder sinkron posisi absolut, gunakan enkoder motor servo seri HK.
Data Cam (Data Profil Operasi)
Buat data profil operasi *1 (data cam) sesuai dengan aplikasi Anda. Data cam yang dibuat digunakan untuk mengontrol sumbu keluaran.
*1."Data profil operasi" adalah nama umum untuk data bentuk gelombang, yang digunakan untuk berbagai aplikasi.
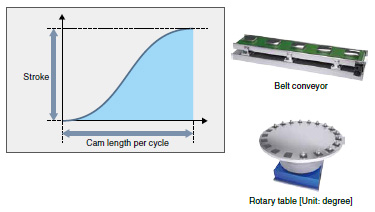
■ Operasi Cam
Tiga operasi cam berikut tersedia: operasi linier, operasi dua arah, dan operasi umpan. Pilih satu sesuai dengan aplikasi Anda.
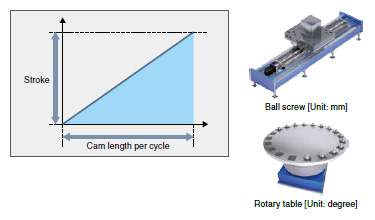
Operasi linear
Pola cam adalah garis linear.
Pola ini digunakan untuk sekrup bola dan meja putar.
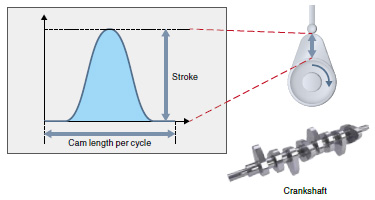
Operasi dua arah
Awal dan akhir pola cam adalah sama.
Cam mekanis termasuk dalam kategori ini.
Operasi pengumpanan
Awal dan akhir pola cam berbeda.
Pola ini digunakan untuk operasi pengumpanan dengan jumlah tetap dan operasi terputus-putus.
Tetapkan titik akhir untuk operasi pengumpanan ke posisi pilihan Anda.
Fungsi Probe Sentuh
Fungsi ini mengunci data yang merespons input sinyal pemicu ke penguat servo.
Jumlah kompensasi dihitung berdasarkan data yang terkunci, dan kesalahan dikompensasi menggunakan sumbu kompensasi.
Probe sentuh dengan akurasi tinggi pada 1 μs dimungkinkan.
Perekam Sistem Servo
Modul Motion secara otomatis mengumpulkan data dari semua servo amplifier saat terjadi kesalahan. Data yang dikumpulkan, seperti perintah dan nilai umpan balik, sangat membantu Anda menganalisis penyebab kesalahan.
- Pengumpulan data otomatis, seperti data posisi, kecepatan, dan torsi, tanpa pemrograman.
- Pengumpulan data dari semua sumbu, yang membantu Anda menemukan penyebab kesalahan bahkan saat kesalahan disebabkan oleh sumbu lain tanpa kesalahan.
- Fungsi co-recording mengumpulkan data bahkan saat terjadi kesalahan pada perangkat perekaman lainnya.
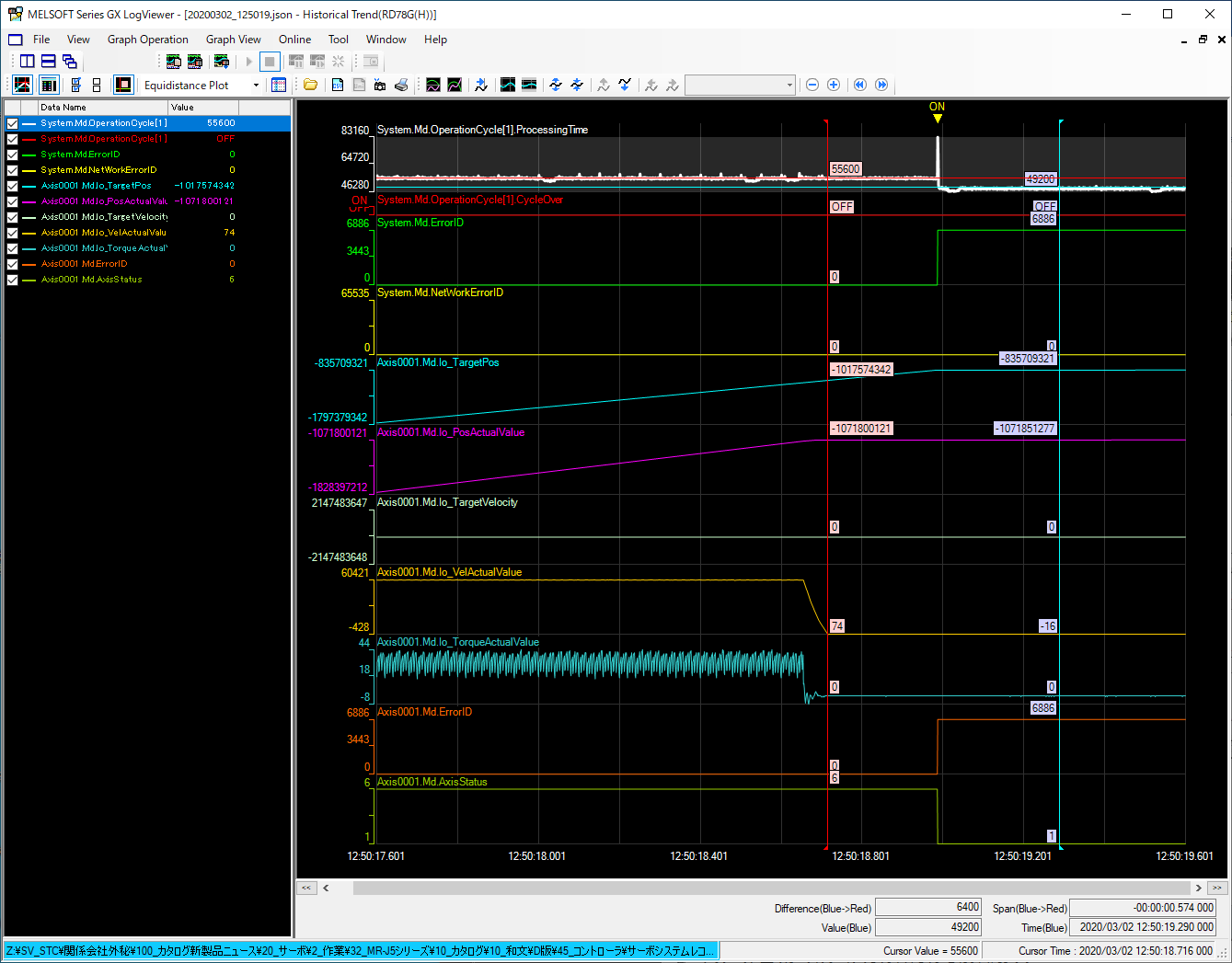
GX LogViewer
Data yang dikumpulkan dapat diperiksa pada GX LogViewer.
Status operasi sebelum dan sesudah kesalahan ditampilkan dalam bentuk gelombang, yang memungkinkan Anda menganalisis lebih banyak detail operasi dan membantu Anda menemukan penyebab kesalahan.
[Fitur]
- Menampilkan data dan peristiwa yang dikumpulkan secara grafis.
- Memungkinkan pengguna untuk menyesuaikan grafik dengan mudah melalui fungsi penyesuaian otomatis dan operasi seret.
Fungsi Komunikasi Keamanan CC-Link IE TSN
CC-Link IE TSN memungkinkan kontrol komunikasi keselamatan dan non-keselamatan dengan mewujudkan sistem yang fleksibel di mana komunikasi keselamatan dapat dengan mudah dimasukkan ke dalam jaringan kontrol utama.
Dalam sistem berikut yang mengintegrasikan komunikasi keselamatan dan non-keselamatan, CPU keselamatan memeriksa sinyal keselamatan yang diterima melalui modul I/O jarak jauh keselamatan dan mengeluarkan sinyal keselamatan (STO, dll.) ke penguat servo. Mengeluarkan sinyal keselamatan melalui jaringan menghilangkan kebutuhan untuk memasang kabel sinyal keselamatan ke pengontrol keselamatan dan penguat servo.
*1.Didukung oleh seri MELSERVO-J5.
Untuk penguat servo yang mendukung fungsi komunikasi keselamatan, rujuk ke "Sub-Fungsi Keselamatan".
Lingkungan Teknik
MELSOFT GX Works3 mencakup berbagai aspek proses pengembangan - pengaturan parameter, penyesuaian servo, dan debugging modul Motion serta pembuatan program sekuens. Perangkat lunak ini menawarkan lingkungan rekayasa yang menyediakan lingkungan desain yang nyaman.
MELSOFT GX Works3
Berbagai fitur terintegrasi ke dalam GX Works3, yang memungkinkan pengguna tidak hanya membuat proyek dengan mudah tetapi juga menjaga konsistensi melalui seluruh proses pengembangan.

■ Pengaturan Konfigurasi Jaringan
[Pengaturan konfigurasi jaringan]
- Pengaturan jaringan yang intuitif dengan operasi drag-and-drop dan tampilan layar grafis
[Deteksi otomatis]
- Dengan mengklik tombol [Deteksi Modul Terhubung/Terputus], status koneksi stasiun perangkat akan otomatis terdeteksi dan layar konfigurasi CC-Link IE TSN akan dibuat.

■ Pemrograman Mudah Melalui Bahasa Teks Terstruktur
- Program teks terstruktur tersusun dari blok-blok fungsi, yang meningkatkan keterbacaan program.
- Modularisasi program meningkatkan kegunaannya kembali.
- Operabilitas umum yang konsisten pada satu alat rekayasa meningkatkan kegunaan lebih jauh.
- Berbagai pilihan elemen pemrograman di Perpustakaan MELSOFT berkontribusi untuk mengurangi waktu pemrograman.
- Program dibuat dengan menyeret & melepaskan elemen pemrograman, yang menyederhanakan proses pemrograman.
- Waktu mulai berkurang menggunakan simulator MELSOFT GX Works3 yang dapat men-debug program tanpa mesin.
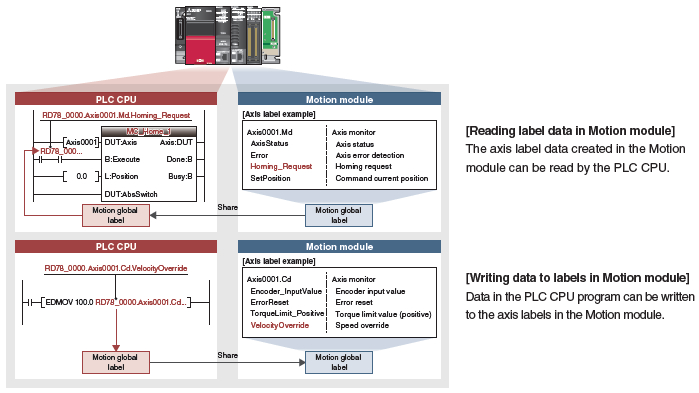
■ Pemrograman Menggunakan Label
- Sumbu kontrol modul Motion dan sinyal I/O ditetapkan sebagai variabel label, yang memungkinkan penggunaan kembali program dengan mudah dan membantu meningkatkan efisiensi pemrograman.
- Label global yang dibuat dalam proyek modul Motion dapat digunakan dalam CPU PLC.
GX LogViewer
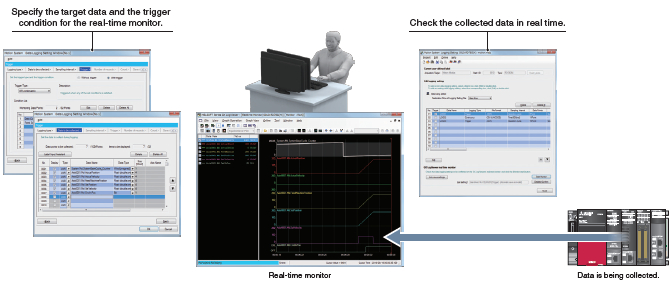
Data grafik dari kedua modul CPU PLC dan modul Motion dapat diperiksa pada GX LogViewer. Alat ini membantu Anda menganalisis data dari dua modul yang berbeda secara efisien. Dua fungsi berikut disediakan untuk pencatatan: fungsi pencatatan data (offline) dan monitor waktu nyata.
■ Fungsi Pencatatan Data
Fungsi ini melakukan pencatatan data dalam interval waktu tertentu berdasarkan pengaturan pencatatan (kondisi pemicu, pengumpulan data) yang ditulis ke modul gerak dari alat rekayasa. Hasilnya disimpan sebagai berkas pencatatan data.
Hingga 10 pengaturan data dapat dicatat secara bersamaan untuk modul gerak.
Status operasi sebelum dan sesudah kesalahan ditampilkan dalam bentuk gelombang, yang memungkinkan Anda menganalisis lebih banyak detail operasi dan membantu Anda menemukan penyebab kesalahan.
■ Pemantau waktu nyata
Hingga 32 data modul gerakan yang dikumpulkan dapat ditampilkan secara waktu nyata.
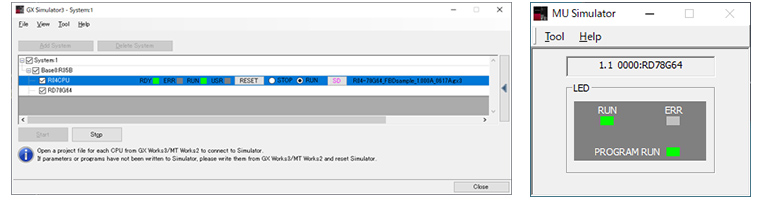
Pra-Verifikasi dan Pemecahan Masalah yang Mudah
Simulator sistem memungkinkan modul Motion dan program CPU PLC disimulasikan secara interaktif.
Operasi program dapat diperiksa tanpa mesin sebenarnya selama proses debugging, yang mempersingkat waktu startup.
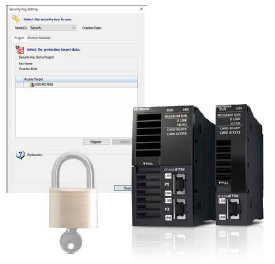
Fungsi Autentikasi Kunci Keamanan
Autentikasi kunci keamanan mencegah program dibuka pada komputer pribadi yang kunci keamanannya belum terdaftar. Selain itu, karena program hanya dapat dijalankan oleh modul Motion yang kunci keamanannya terdaftar, integritas teknologi pelanggan dan kekayaan intelektual lainnya tidak terganggu.
Panduan Memulai Cepat
Daftar Fungsi
| Motion Module | |||||||
|---|---|---|---|---|---|---|---|
| RD78GHW | RD78GHV | RD78G64 | RD78G32 | RD78G16 | RD78G8 | RD78G4 | |
| Maximum number of control axes | 256 | 128 | 64 | 32 | 16 | 8 | 4 |
| Minimum operation cycle [μs] *1 | 31.25 | 62.5 | |||||
| Servo amplifier connection method | CC-Link IE TSN (Communications speed: 1 Gbps/100 Mbps) | ||||||
| Connectable servo amplifier | MR-J5-G, MR-J5W-G, MR-J5D-G4 Selengkapnya MR-JET-G Selengkapnya |
||||||
| Maximum distance between stations [m(ft.)] |
100(328.08) | ||||||
| Control modes | Position control, Speed control, Torque control, Synchronous control, Cam control | ||||||
| Positioning control | Position control, Linear interpolation (Up to 4 axes), Circular interpolation (2 axes) | ||||||
| Acceleration/deceleration process | Trapezoidal acceleration/deceleration, Jerk acceleration/deceleration, Acceleration/deceleration time fixed method |
||||||
| Programming language | PLC CPU: Sequence program, FBD/LD, ST Motion module: ST |
||||||
| Home position return | Driver home position return*2 | ||||||
| Manual control | JOG operation | ||||||
| Auxiliary functions |
Forced stop, Hardware stroke limit, Software stroke limit, Absolute position system, |
||||||
| Common functions | Touch probe, Axis emulate, Event history, Monitoring of servo data, Servo system recorder, Inter-module synchronization |
||||||
| Engineering environment | MELSOFT GX Works3 | ||||||
| Number of I/O occupying points | 32 points + 16 points (empty slot) | 32 | |||||
| 5VDC internal current consumption [A] |
2.33 | 1.93 | |||||
| Mass [kg] | 0.44 | 0.26 | |||||
- *1.Siklus operasi minimum bervariasi tergantung pada jumlah sumbu kontrol dan model.
- *2.Metode pengembalian posisi awal yang diatur dalam driver (penguat servo) digunakan.
- *3.Didukung oleh seri MELSERVO-J5.