Motion module Fitur (Mode Gerakan Sederhana)

- Rangkaian produk
- Kontrol Pemosisian
- Kontrol Sinkron Lanjutan
- Operasi Berkelanjutan ke Kontrol Torsi
- Fungsi Tambahan
- Keamanan CC-Link IE TSN Fungsi Komunikasi
- Pemantau Data Opsional
- Komunikasi Driver
- Lingkungan Rekayasa
- Daftar Fungsi
- Tautan Terkait


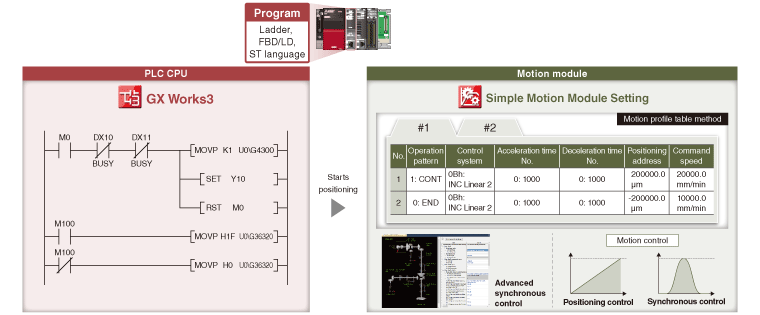
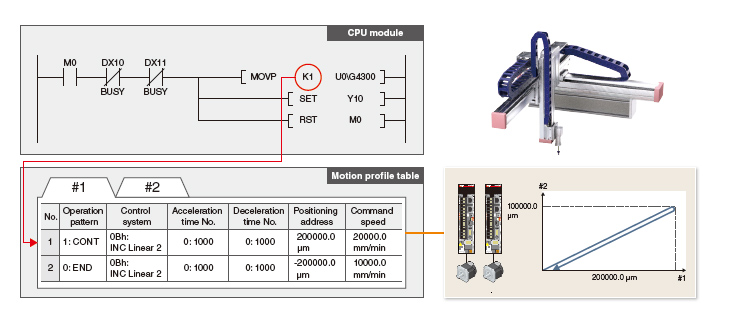
- ●Kontrol posisi dapat dilakukan dengan mudah menggunakan tabel profil gerakan. Kontrol sinkron hanya dapat dijalankan dengan pengaturan parameter.
- ●Perangkat jarak jauh dihubungkan melalui CC-Link IE TSN dan diprogram dari CPU PLC.
- ●Data yang disinkronkan dengan siklus operasi gerakan dapat dikumpulkan dengan osiloskop digital. Data yang dikumpulkan ditampilkan dalam bentuk gelombang untuk verifikasi operasi.
[Contoh pemrograman oleh CPU PLC]
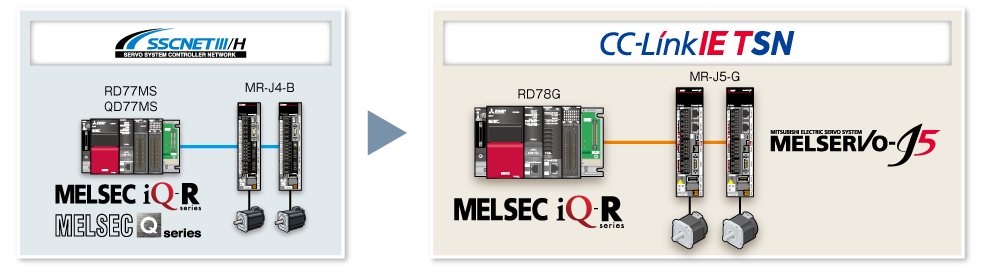
Pemanfaatan Program yang Ada
Perangkat dan program seri MELSEC iQ-R/MELSEC-Q yang ada dapat digunakan kembali dalam sistem baru modul RD78G Motion yang mendukung mode Simple Motion.
Rangkaian produk

RD78G4
RD78G8
RD78G16
- Jumlah maksimum sumbu kontrol: 16 sumbu/modul (RD78G16)
- Siklus operasi minimum *1: 250 [μs]
- *1.Siklus operasi bervariasi berdasarkan jumlah sumbu kontrol dan model.
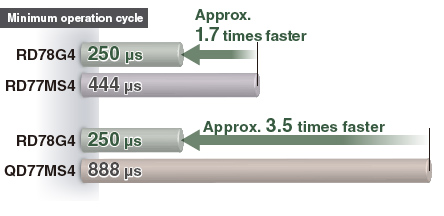
Peningkatan Kinerja
Siklus operasi minimum RD78G dalam mode Simple Motion sekitar 1,7 hingga 3,5 kali lebih cepat daripada model sebelumnya. Data dari penguat servo dan sinyal input/output dapat diterima pada kecepatan tinggi, yang mengurangi waktu siklus.
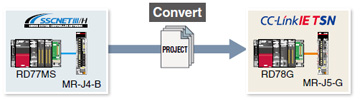
Pemanfaatan Kembali Proyek yang Ada
Proyek yang ada pada modul Simple Motion dapat digunakan kembali. Hal ini memungkinkan pengurangan waktu pengembangan program.
RD77MS→RD78G
Pilih [Ubah Modul] di menu navigasi GX Works3 untuk mengonversi proyek modul Simple Motion menjadi proyek modul Motion.
Setelah konversi, atur parameter jaringan, parameter penguat servo, dan parameter lainnya.
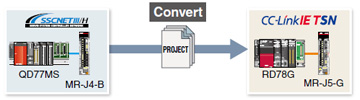
QD77MS→RD78G
Pilih [Impor Data Modul Gerak Sederhana] di menu navigasi GX Works3 untuk mengimpor parameter QD77MS.
Setelah impor, atur parameter jaringan, parameter penguat servo, dan parameter lainnya.
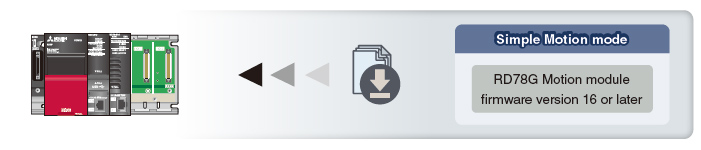
Firmware Modul Gerak RD78G
Mode Gerak Sederhana didukung oleh RD78G dengan versi firmware 16 atau yang lebih baru.
Untuk mendapatkan berkas pembaruan firmware, hubungi kantor penjualan setempat.
Positioning Control
Kontrol posisi mudah dijalankan menggunakan tabel profil gerak.
- Untuk memenuhi berbagai kebutuhan aplikasi, modul Motion menawarkan berbagai jenis kontrol pemosisian, seperti interpolasi linier, interpolasi melingkar 2 sumbu, umpan fixedpitch, dan kontrol jalur kontinu.
- Kontrol pemosisian dapat dijalankan dengan mudah dengan mengatur alamat pemosisian, kecepatan, dan item pengaturan lainnya dalam program sekuens.
- Subfungsi yang canggih, seperti keluaran kode-M, lewati, perubahan kecepatan, dan fungsi perubahan posisi target, tersedia.
Pemrograman
Modul Gerak dengan mudah menjalankan operasi pemosisian dengan instruksi dalam program berurutan yang memulai data pemosisian tabel profil gerak.
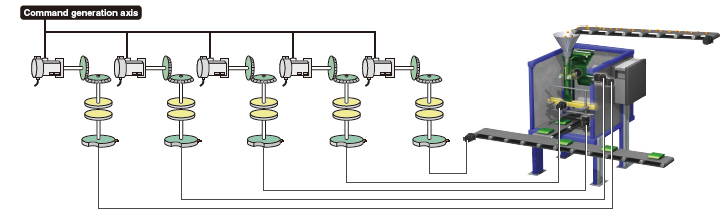
Kontrol Sinkron Lanjutan
Kontrol sinkron dapat dicapai menggunakan perangkat lunak alih-alih mengendalikan secara mekanis dengan roda gigi, poros, kopling, roda gigi pengubah kecepatan atau cam, dll.
- Kontrol sinkron dapat dimulai/diakhiri secara fleksibel untuk setiap sumbu, yang memungkinkan sumbu kontrol sinkron dan sumbu kontrol pemosisian digunakan dalam program yang sama.
- Sumbu pembangkit perintah, sumbu masukan servo, atau sumbu enkoder sinkron *1 dapat ditetapkan sebagai sumbu masukan.
- Sumbu keluaran dioperasikan dengan cam. Tiga operasi berikut dapat dilakukan dengan fungsi cam: operasi linear, operasi dua arah, dan operasi umpan.
- Encoder sinkron inkremental *2 dapat dihubungkan melalui penguat servo.
- *1.Didukung oleh seri MELSERVO-J5.
- *2.Saat menghubungkan encoder sinkron posisi absolut, gunakan encoder motor servo seri HK.
[Sumbu pembangkit perintah]
Sumbu pembangkit perintah adalah sumbu yang hanya melakukan pembangkitan perintah.
Sumbu ini dikontrol secara independen dari sumbu lain yang terhubung ke penguat servo. (tidak dihitung sebagai sumbu kontrol)
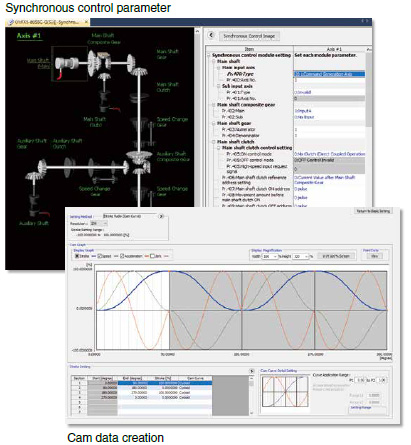
Pengaturan Parameter
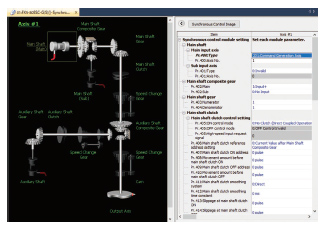
Kontrol sinkron dijalankan dengan mengatur parameter sumbu input, sumbu output, roda gigi, dan kopling untuk kontrol sinkron dan menyalakan sinyal mulai kontrol sinkron.
Data Cam (Data Profil Operasi)
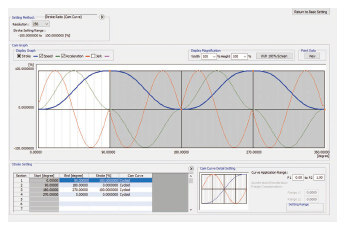
Grafik cam dapat dibuat secara fleksibel dan mudah melalui drag & drop. Bentuk gelombang diubah sesuai dengan gerakan pointer.
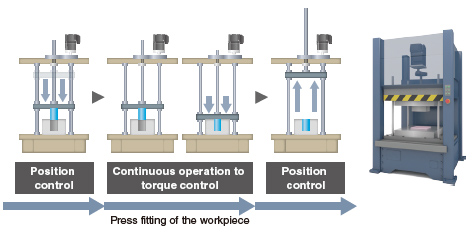
Pengoperasian Berkelanjutan hingga Kontrol Torsi
Sumbu dikontrol agar berjalan pada torsi konstan dengan mengikuti perintah torsi saat posisi saat ini sedang diproses.
Peralihan dari kontrol posisi ke kontrol torsi secara terus-menerus dapat dilakukan tanpa menghentikan motor servo.
Fungsi Tambahan
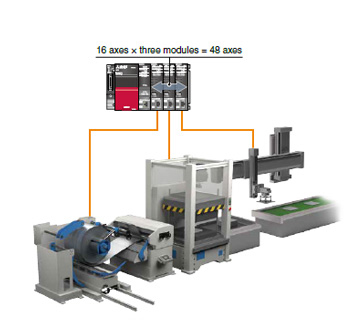
Sinkronisasi Antar-Modul
Fungsi sinkronisasi antar-modul dapat menyinkronkan pengaturan waktu kontrol di antara beberapa modul Motion pada unit dasar yang sama.
Mesin dapat disinkronisasikan melalui fungsi ini saat setiap mesin menggunakan modul Motion.
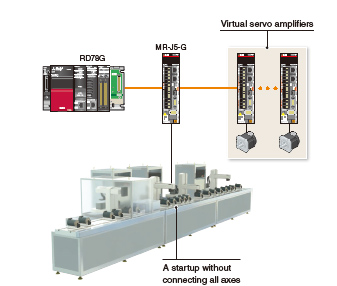
Penguat Servo Virtual
Fungsi penguat servo virtual memungkinkan pengoperasian penguat servo virtual seolah-olah unit yang sebenarnya terhubung. Ketika penguat servo virtual ditetapkan sebagai sumbu input servo dari kontrol sinkron, modul Gerak menjalankan kontrol sinkron dengan perintah input yang dihasilkan secara virtual. Selain itu, fungsi ini digunakan untuk mensimulasikan sumbu tanpa koneksi yang sebenarnya.
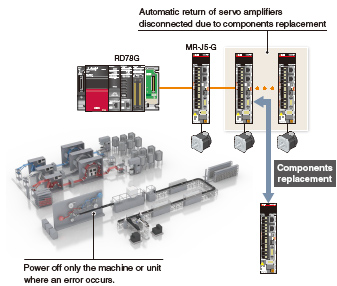
Pengembalian Otomatis
Ketika stasiun perangkat kembali ke status normal setelah terputus karena kesalahan tautan data, fungsi ini secara otomatis mengembalikan stasiun yang terputus ke jaringan dan memulai kembali tautan data.
Komponen dapat diganti dengan mematikan hanya mesin tempat kesalahan terjadi. Mematikan seluruh sistem tidak diperlukan.
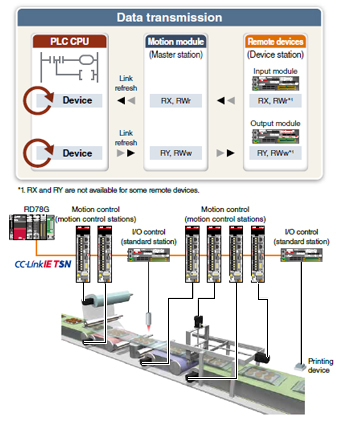
Operasi Baca/Tulis Stasiun Standar
- CPU PLC mengirim/menerima perangkat penghubung ke/dari stasiun standar (stasiun perangkat selain stasiun kontrol gerak) melalui modul Gerak.
- Komunikasi satu-ke-satu dimungkinkan antara stasiun induk dan stasiun perangkat.
- CPU PLC dapat diprogram menggunakan sinyal stasiun perangkat.
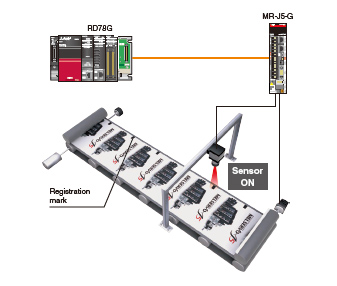
Deteksi Tanda
Fungsi ini mengunci data yang merespons input sinyal pemicu ke penguat servo.
Jumlah kompensasi dihitung berdasarkan data yang dikunci, dan kesalahan dikompensasi menggunakan sumbu kompensasi.
Deteksi tanda dengan akurasi tinggi pada 1 μs dimungkinkan.
Fungsi Komunikasi Keamanan CC-Link IE TSN
CC-Link IE TSN memungkinkan kontrol komunikasi keselamatan dan non-keselamatan dengan mewujudkan sistem yang fleksibel di mana komunikasi keselamatan dapat dengan mudah dimasukkan ke dalam jaringan kontrol utama.
Dalam sistem berikut yang mengintegrasikan komunikasi keselamatan dan non-keselamatan, CPU keselamatan memeriksa sinyal keselamatan yang diterima melalui modul I/O jarak jauh keselamatan dan mengeluarkan sinyal keselamatan (STO, dll.) ke penguat servo. Mengeluarkan sinyal keselamatan melalui jaringan menghilangkan kebutuhan untuk memasang kabel sinyal keselamatan ke pengontrol keselamatan dan penguat servo.
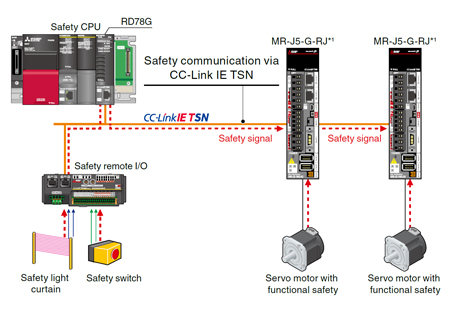
- *1.Didukung oleh seri MELSERVO-J5.
Untuk penguat servo yang mendukung fungsi komunikasi keselamatan, lihat "Sub-Fungsi Keselamatan".
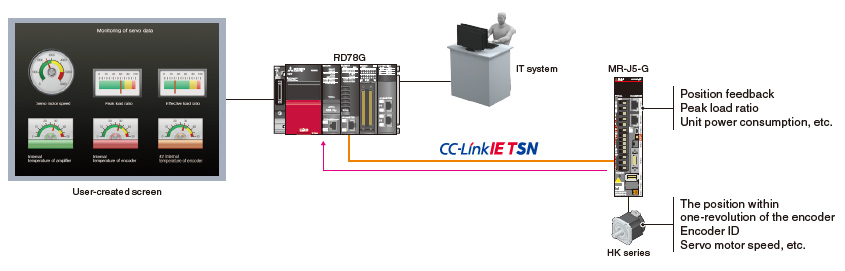
Pemantau Data Opsional
Pengoperasian servo dipantau dengan data servo ekstensif yang diperoleh melalui CC-Link IE TSN. Data yang diperoleh dapat ditransfer ke sistem TI atau ditransfer dan ditampilkan pada layar GOT yang dibuat pengguna di jaringan. Data target untuk pemantauan dapat diubah secara fleksibel selama pengoperasian.
Komunikasi Driver*1
Dengan menggunakan fungsi komunikasi penggerak dari penguat servo, sumbu utama dikontrol dengan modul Gerak, sedangkan sumbu-sumbu berikutnya dikontrol oleh komunikasi data antara penguat servo (komunikasi penggerak) tanpa menggunakan modul Gerak.
Modul Gerak dapat menggerakkan beberapa sumbu dengan hanya mengontrol sumbu utama.
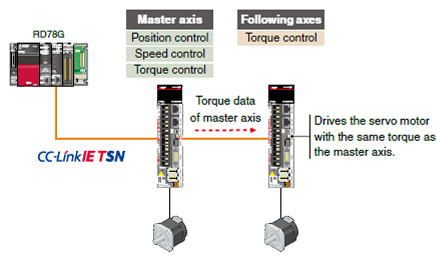
- *1.Didukung oleh Seri MELSERVO-J5.
Lingkungan Teknik
MELSOFT GX Works3 mencakup berbagai aspek proses pengembangan - pengaturan parameter, penyesuaian servo, dan debugging modul Motion serta pembuatan program sekuens. Perangkat lunak ini menawarkan lingkungan rekayasa yang menyediakan lingkungan desain yang nyaman.
MELSOFT GX Works3
Berbagai fitur terintegrasi ke dalam GX Works3, yang memungkinkan pengguna tidak hanya membuat proyek dengan mudah tetapi juga menjaga konsistensi melalui seluruh proses pengembangan.

Desain Sistem

- Konfigurasi modul
- Konfigurasi jaringan
- Pengaturan data untuk penguat servo
- Pengaturan untuk I/O jarak jauh
- Fungsi konversi parameter
Pemrograman (Penempatan)

- Pemrograman dengan Ladder, SFC, FBD/LD
- Pengaturan data posisi
- Simulasi offline, perhitungan otomatis kecepatan perintah
Pemrograman (Kontrol Sinkron Lanjutan)
- Parameter kontrol sinkron
- Pembuatan data cam, daftar data cam
Debug/Pemeliharaan
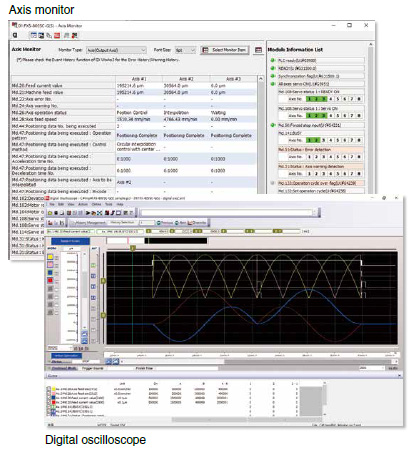
- Riwayat kejadian
- Riwayat nilai saat ini, riwayat awal, monitor sumbu
- Monitor servo
- Osiloskop digital
Daftar Fungsi
| Motion Module | ||||
|---|---|---|---|---|
| RD78G16 | RD78G8 | RD78G4 | ||
| Maximum number of control axes | 16 | 8 | 4 | |
| Minimum operation cycle [μs]*1 | 250 | |||
| Servo amplifier connection method | CC-Link IE TSN (Communications speed: 1 Gbps/100 Mbps) | |||
| Connectable servo amplifier | MR-J5-G, MR-J5W-G, MR-J5D-G4 Selengkapnya MR-JET-G Selengkapnya |
|||
| Maximum distance between stations [m(ft.)] | 100 (328.08) | |||
| Control modes | Position control, Speed control, Torque control, Synchronous control, Cam control | |||
| Positioning control | Position control, Linear interpolation (Up to 4 axes), Circular interpolation (2 axes), Helical interpolation |
|||
| Acceleration/deceleration process | Trapezoidal acceleration/deceleration, S-curve acceleration/deceleration | |||
| Positioning control method | Motion profile table | |||
| Home position return | Driver home position return*2 | |||
| Manual control | JOG operation, Manual pulse generator operation, Inching operation | |||
| Auxiliary functions | Forced stop, Hardware stroke limit, Software stroke limit, Absolute position system, Digital oscilloscope function, Acceleration/deceleration time change, Inter-Module Synchronization, Target position change, Torque limit value change, Speed change, Override, CC-Link IE TSN safety communication function*3 |
|||
| Common functions | Driver Communication, Mark detection, Virtual servo amplifier, Event history, Optional data monitor | |||
| Engineering environment | MELSOFT GX Works3 | |||
| Number of I/O occupying points | 32 | |||
| 5VDC internal current consumption [A] | 1.93 | |||
| Mass [kg] | 0.26 | |||
- *1.Siklus operasi minimum bervariasi tergantung pada jumlah sumbu kontrol dan model.
- *2.Metode pengembalian posisi awal yang diatur dalam driver (penguat servo) digunakan.
- *3.Didukung oleh seri MELSERVO-J5.