Product Features Servo System Controller

Servo system controller
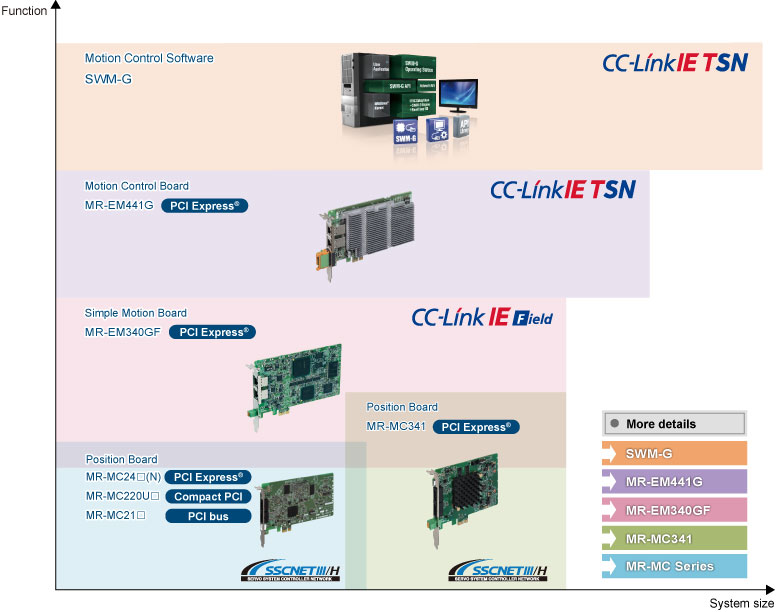
Lineup capable of responding to versatile sizes and applications
Extensive Motion control

[Motion Control Software]
Installed on a personal computer, SWM-G Motion Control Software can perform motion and network control.
Combined with a CC-Link IE TSN-compatible servo amplifier, the controller offers a high-performance servo system.
[Motion Control Board] MR-EM441G
Connected to the PCI Express ® extended slot of an industrial personal computer, MR-EM441G realizes fast and accurate motion control.
[Simple Motion Board] MR-EM340GF
Embedded in a personal computer which supports PCI Express ® , MR-EM340GF can perform various types of motion control, such as positioning, synchronous, and speed-torque control.
[Position Board] MR-MC341, MR-MC200 Series
MR-MC341 and MR-MC200 series are board type controllers for controlling MELSERVO-J5/MELSERVO-J4 series SSCNET III/H compatible servo amplifiers, through a user program. The controllers achieve positioning control, interface mode, and tightening & press-fit control.
Programming
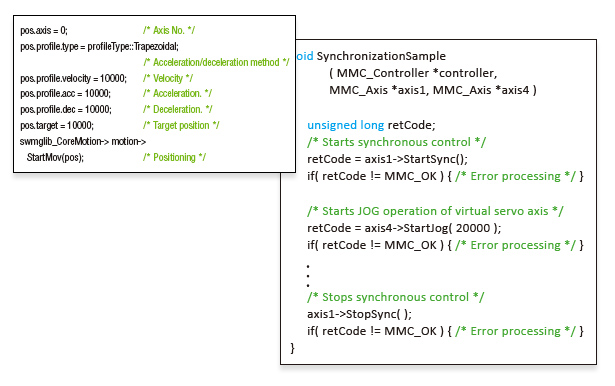
Function Examples
[Motion Control Software] SWM-G
Performs software-based and high-precision motion control with CC-Link IE TSN.
- Linear interpolation
- Jerk acceleration/deceleration
- Touch probe (mark detection)
- Synchronous control (tandem drive)
- Gantry home position return
- Target position change
- Triggered motion
- Hot connect (disconnection/reconnection)
- Monitoring of servo data
- Position synchronous output
[Motion Control Board] MR-EM441G
High-speed motion control in an industrial personal computer environment with CC-Link IE TSN Network.
- Linear interpolation
- Circular interpolation
- Jerk acceleration/deceleration
- Other axes start
- Tandem operation
- Pressure control
- Continuous operation to torque control
- Target position change
- Pass position interrupt
- Monitoring of servo data
- Absolute position system
[Simple Motion Board] MR-EM340GF
Enables various types of motion control in a PC environment with CC-Link IE.
- Cam auto-generation
- Mark detection
- Monitoring of servo data
- Absolute position system
- Unlimited length feed
- Target position change
- Event history
- Digital oscilloscope
- Direct control
[Position Board] MR-MC341, MR-MC200 Series
Enables high-response positioning control.
- Linear interpolation
- Jerk acceleration/deceleration
- Vibration suppression command filter
- Absolute position system
- Tandem operation
- Target position change
- Other axes start
- Pass position interrupt
- Interface mode