Safety Sub-Functions Compliant with IEC/EN 61800-5-2
MR-J5-G-HS/MR-J5-G-RJ/MR-J5W_-G/MR-J5D_-G4 support safety sub-functions, STO/SS1/SS2/SOS/SBC/SLS/SSM/SDI/SLI/SLT.
Refer to " Safety Sub-Functions " in section 1 of MELSERVO-J5 catalog for the safety sub-functions and the safety levels, which vary depending on the combinations of the servo amplifiers and the rotary servo motors (including servo motors with functional safety)/linear servo motors/direct drive motors.
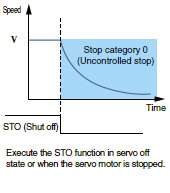
Safe torque off
(STO)
Responding to the input signal from external equipment, the STO function shuts off power to the servo motor electronically using the internal circuit (shuts off through secondary-side output).
This function corresponds to the Stop category 0 of IEC/EN 60204-1.
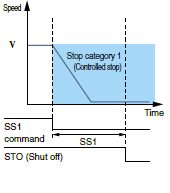
Safe stop 1
(SS1)
Responding to the input signal from external equipment, the servo motor starts to decelerate. After the set delay time for motor stop is passed, the STO function starts.
Monitoring the servo motor deceleration based on the motor deceleration rate is also supported.
This function corresponds to the Stop category 1 of IEC/EN 60204-1.
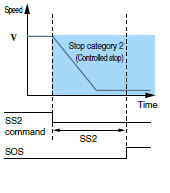
Safe stop 2
(SS2)
Responding to the input signal from external equipment, the servo motor starts to decelerate. After the set delay time for motor stop is passed, the SOS function starts.
Monitoring the servo motor deceleration based on the motor deceleration rate is also supported.
This function corresponds to the Stop category 2 of IEC/EN 60204-1.
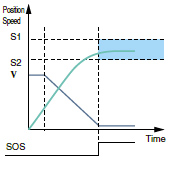
Safe operating stop
(SOS)
This function monitors the position of the servo motor not to deviate from the specified range. Power is still supplied to the servo motor during the SOS function.
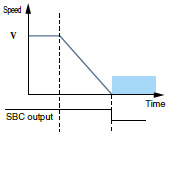
Safe brake control
(SBC)
The SBC signals are outputted for external brake control.
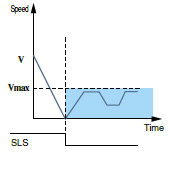
Safely-limited speed
(SLS)
This function monitors the speed of the servo motor not to exceed the specified speed limit. If the speed exceeds the limit, the motor power is shut off by the STO.
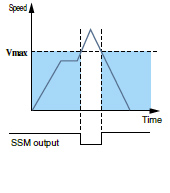
Safe speed monitor
(SSM)
The SSM signals are outputted when the speed of the servo motor is below the specified speed limit.
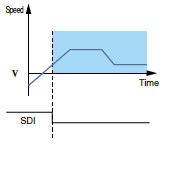
Safe direction
(SDI)
This function monitors whether the servo motor moves in the command direction.
If the servo motor moves in a different direction from the command direction, the STO function is executed.
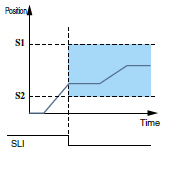
Safely-limited increment
(SLI)
This function monitors the travel distance of the servo motor not to deviate from the specified range.
If the travel distance exceeds the range, the STO function is executed.
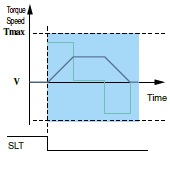
Safely-limited torque
(SLT)
This function monitors the torque (or the thrust) of the servo motor not to deviate from the specified range. If the torque (or the thrust) exceeds the range, the STO function is executed.