Mô-đun Giao diện Bộ điều khiển C Tính năng

Q173SCCF
- Tính năng
- Lợi ích
- Môi trường Phát triển Phần mềm
- SSCNETIII/H
- Mô-đun Đầu SSCNETIII/H
- Kiểm soát định vị
- Chức năng Khởi động Các Trục Khác
- Chức năng Ngắt Vị trí Pass
- Kiểm soát Siết chặt & Lắp ghép
- Chức năng Chế độ Giao diện
- Danh sách Chức năng
Tính năng
- Hệ thống được cấu hình với Bộ điều khiển C có chu kỳ sống sản phẩm dài hơn trên thị trường so với máy tính thông thường.
- Các chương trình dựa trên sự kiện, sử dụng ngắt, có thể được tạo ra.
- Được trang bị chức năng Định vị sử dụng bảng điểm.
- Mô-đun Đầu SSCNETIII/H cho phép Mô-đun Giao diện kết nối từ xa với các mô-đun khác nhau (I/O, tương tự, bộ đếm tốc độ cao, v.v.) qua SSCNETIII/H.
- Thư viện API có sẵn để phát triển phần mềm hiệu quả hơn.
- Mô-đun Giao diện hỗ trợ các Bộ điều khiển C nơi Lineo uLinux được cài đặt.
(Lưu ý): Liên hệ với văn phòng Mitsubishi Electric địa phương của bạn.
|
||||||||
|
||||||||
.jpg)
Lợi ích Q173SCCF Dòng MR-MC
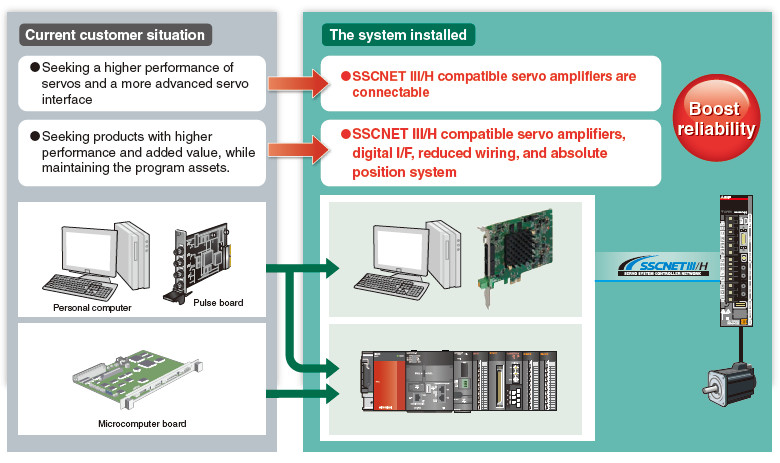
Cấu hình
Môi trường Phát triển Phần mềm Q173SCCF
Tạo chương trình người dùng bằng cách thêm thư viện API điều khiển định vị vào dự án trong môi trường phát triển phần mềm C Controller “CW Workbench”. Vì hệ điều hành cho C Controller (VxWorks ® ) đã được cài đặt sẵn, nên không cần phải cài đặt thêm.
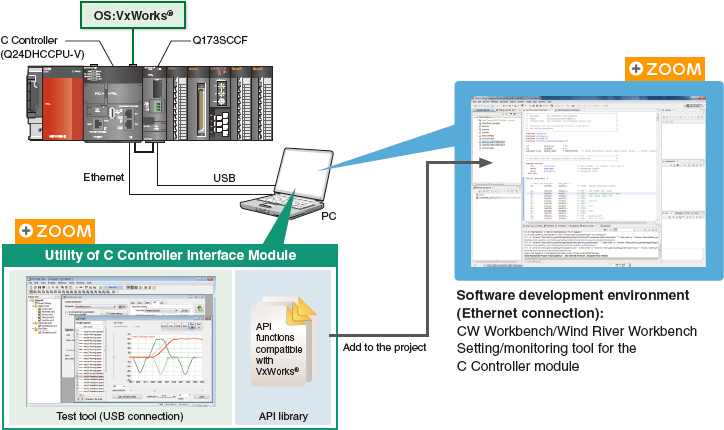
Tiện ích
Tiện ích cho Mô-đun giao diện Bộ điều khiển C/Bảng định vị bao gồm phần mềm sau đây cần thiết cho phát triển ứng dụng.

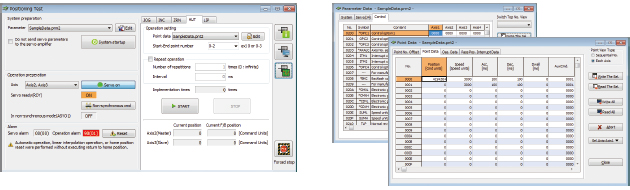
Công cụ kiểm tra
Công cụ này hỗ trợ thiết lập tham số và dữ liệu điểm cho phát triển ứng dụng, kiểm tra hoạt động như điều chỉnh servo và phân tích lỗi. MR Configurator2 có thể được khởi động từ công cụ kiểm tra, do đó việc điều chỉnh servo được thực hiện dễ dàng.
Kiểm tra hoạt động thử nghiệm dễ dàng
Hoạt động thử nghiệm được thực hiện dễ dàng bằng cách sử dụng các chức năng kiểm tra vị trí và các chức năng thiết lập dữ liệu tham số/điểm.
Các chức năng này hữu ích cho việc kiểm tra dây SSCNETIII/H và chuyển động của động cơ.
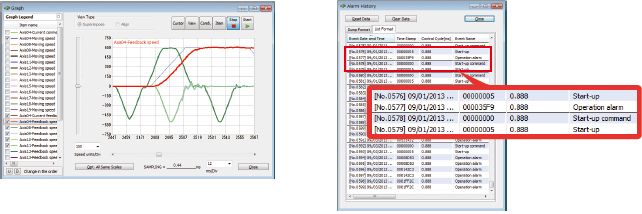
Bảo trì
Bạn có thể xác nhận dạng sóng mẫu của dữ liệu giám sát (32 mục) và dữ liệu bit (16 mục) để kiểm tra trình tự của các chương trình người dùng và thời gian khởi động.
Phân tích lỗi được thực hiện dễ dàng bằng cách đọc lịch sử báo động được lưu trữ trên bộ nhớ không bay hơi.
Thư viện API
Thư viện API là các hàm API để tạo ứng dụng cho Bộ điều khiển C hoặc trên máy tính cá nhân.
Khởi tạo bộ khuếch đại servo, thay đổi tham số, khởi động trong các chế độ hoạt động khác nhau và giám sát, v.v. đều có sẵn.
Trình điều khiển thiết bị
Trình điều khiển thiết bị là phần mềm cần thiết khi một Bộ điều khiển C/máy tính cá nhân truy cập vào Mô-đun Giao diện/Bảng định vị từ một chương trình người dùng qua PCI Express< ® /bus PCI. Bạn không cần phải chuẩn bị riêng một trình điều khiển thiết bị.
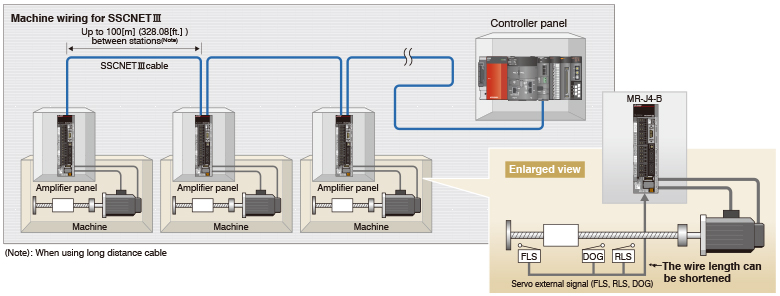
Mạng đồng bộ tốc độ cao SSCNETIII/H Q173SCCF Dòng MR-MC
- Tốc độ truyền thông được tăng lên 150 Mbps full duplex (tương đương với 300 Mbps half duplex), nhanh gấp ba lần so với tốc độ thông thường.
Phản hồi hệ thống được cải thiện đáng kể. - Kiểm soát mượt mà một máy móc có thể thực hiện bằng cách sử dụng giao tiếp nối tiếp tốc độ cao với thời gian chu kỳ 0.222 ms.
- Giao tiếp đồng bộ được thực hiện với SSCNETIII/H, mang lại lợi thế kỹ thuật cho các máy móc yêu cầu kiểm soát xác định.
- Việc đi dây khoảng cách dài có thể lên đến 3200 m (10498.69 ft.) cho mỗi hệ thống (tối đa 100 m (328.08 ft.) giữa các trạm x trục điều khiển lên đến 32 trục), phù hợp cho các hệ thống quy mô lớn.
- Các bộ khuếch đại servo tương thích với SSCNETIII/H và SSCNETIII có thể được sử dụng cùng nhau.
(Tốc độ giao tiếp khi các sản phẩm tương thích SSCNETIII được sử dụng cùng nhau trong cùng một hệ thống: 150 Mbps full duplex)
Mô-đun đầu vào LJ72MS15 SSCNETIII/H Q173SCCF Dòng MR-MC
Mô-đun đầu SSCNETIII/H cho phép bộ điều khiển kết nối từ xa với các mô-đun khác nhau (I/O, tương tự, bộ đếm tốc độ cao, v.v.) qua SSCNETIII/H.
Các mô-đun kết nối từ xa này hoạt động như các trạm từ xa của bộ điều khiển, truyền tải các tín hiệu đầu vào/đầu ra.
Điều này dẫn đến việc giảm thiểu dây dẫn vì bộ điều khiển nhận tín hiệu I/O và tín hiệu I/O tương tự trực tiếp từ phía bộ khuếch đại servo.
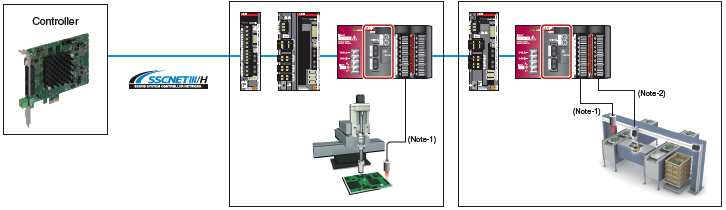
- (Lưu ý-1): Các tín hiệu đầu vào/đầu ra cảm biến cho các thiết bị kiểm tra, v.v. có thể được đọc/ghi qua mô-đun đầu.
- (Lưu ý-2): Xuất tín hiệu mở/đóng tay.
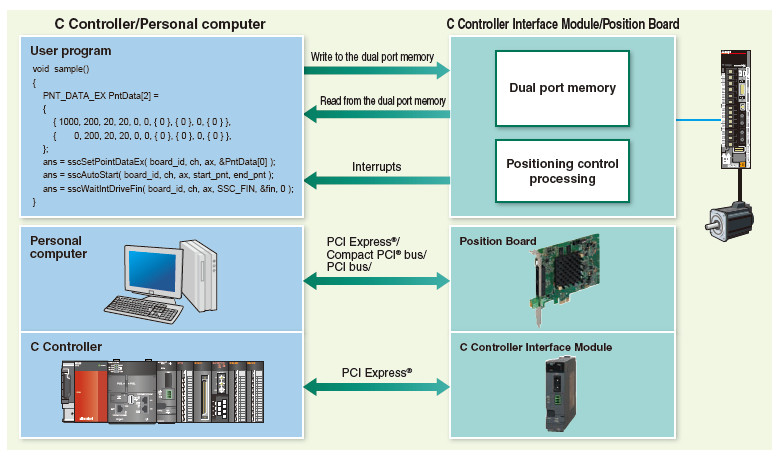
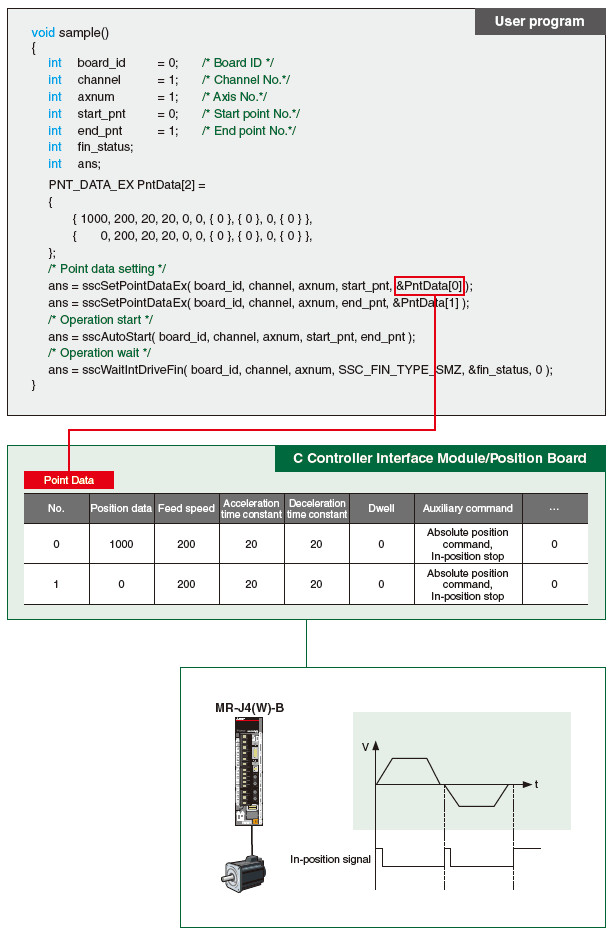
Kiểm soát định vị Q173SCCF Dòng MR-MC
Hoạt động định vị được thực hiện bằng cách sử dụng thư viện API trong một chương trình người dùng ngôn ngữ C.
Hoạt động được bắt đầu với dữ liệu định vị từ bảng dữ liệu điểm và chờ cho đến khi một sự kiện xảy ra qua ngắt.
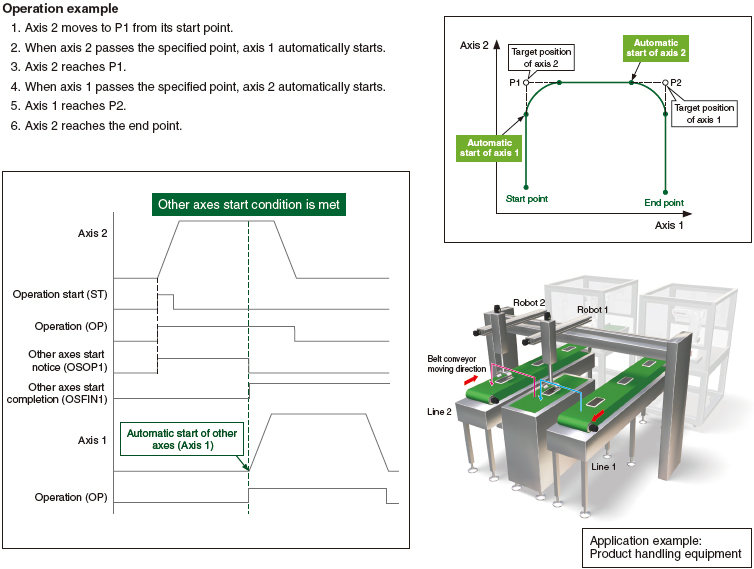
Chức năng Khởi động Các Trục Khác Q173SCCF Dòng MR-MC
Chức năng này tự động khởi động các trục khác theo điều kiện khởi động và mẫu hoạt động của nó.
Thời gian tác động của các máy lắp ráp, v.v. được rút ngắn với việc khởi động tự động này qua các bộ điều khiển.
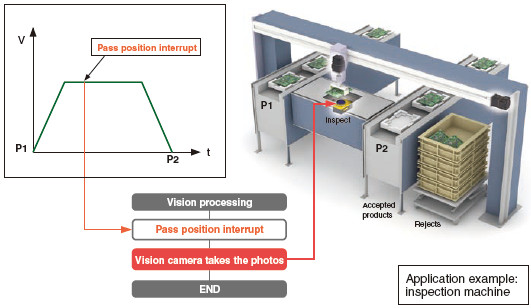
Chức năng Ngắt Vị trí Pass Q173SCCF Dòng MR-MC
Trong quá trình hoạt động tự động, các tín hiệu ngắt được xuất ra khi các trục đi qua vị trí đã chỉ định.
Sau đó, quy trình ngắt tương ứng của chương trình người dùng được khởi động.
- Khởi động xử lý sự kiện tốc độ cao trên phía máy chủ (Hệ điều hành) là khả thi dựa trên vị trí trục servo
- Tổng cộng 64 điểm có thể được chỉ định cho dữ liệu vị trí vượt qua của tất cả các trục
Ví dụ vận hành
- 1. Khi các trục di chuyển từ P1 đến P2, ngắt xảy ra.
- 2. Camera hình ảnh chụp ảnh chi tiết gia công theo các ngắt.
- 3. Dữ liệu vị trí được đọc.
Camera hình ảnh chụp ảnh phản hồi theo các ngắt.
Do đó, bằng cách chụp ảnh định kỳ với các ngắt, dữ liệu vị trí chính xác hơn có sẵn.
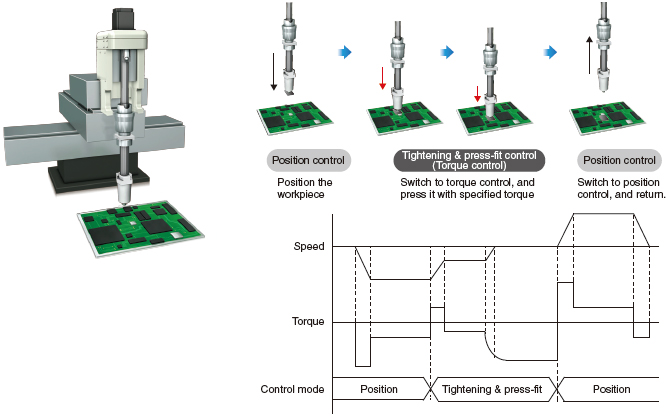
Kiểm soát Siết chặt & Lắp ghép Q173SCCF Dòng MR-MC
Động cơ có thể được chuyển sang điều khiển mô-men xoắn (chế độ siết chặt & ép khít) trong quá trình định vị mà không cần dừng lại.
Vì vị trí hiện tại được kiểm soát ngay cả trong quá trình điều khiển siết chặt & ép khít, hoạt động định vị dựa trên tọa độ vị trí tuyệt đối có thể được thực hiện một cách trơn tru sau khi chuyển trở lại điều khiển định vị.
Chức năng Chế độ Giao diện Q173SCCF Dòng MR-MC
Tính năng tiêu chuẩn này thực hiện điều khiển độc đáo dựa trên chương trình người dùng ngôn ngữ C sử dụng SSCNETIII/H
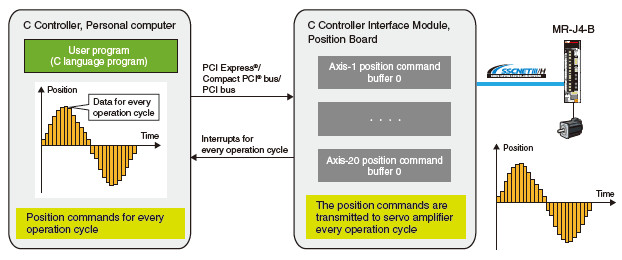
Chức năng chế độ giao diện truyền lệnh vị trí nhận được từ chương trình người dùng đến các bộ khuếch đại servo trong mỗi chu kỳ hoạt động. Điều này cho phép bộ khuếch đại servo được điều khiển bằng chương trình người dùng.
Điều khiển tốc độ và mô-men xoắn cũng có sẵn trong phương pháp này.
Vì vậy, một MR-J4-B có thể được điều khiển dựa trên các chương trình người dùng được tạo ra với kiến thức lập trình của bạn về lệnh vị trí/tốc độ/mô-men xoắn trong khi tận dụng hiệu suất mạng đồng bộ của hệ thống servo SSCNETIII/H.
- Mô-đun giao diện bộ điều khiển C hoặc bảng vị trí điều khiển quá trình SSCNETIII/H. Điều này cho phép phía chương trình người dùng tập trung vào xử lý thông tin, giao diện người-máy và điều khiển chuyển động.
- Một máy tính cá nhân với hệ điều hành thời gian thực có thể thực hiện điều khiển chuyển động theo chu kỳ cố định bằng cách sử dụng ngắt trong mỗi chu kỳ hoạt động.
- Nhờ vào bộ đệm lệnh vị trí lên đến 64 pha, ngay cả hệ điều hành không thời gian thực (Windows ® chỉ) có thể thực hiện lệnh chu kỳ với tốc độ 0.22 ms (tốc độ nhanh nhất); Điều này cho phép tăng độ chính xác trong kiểm soát quỹ đạo.
Danh sách Chức năng
| Chế độ Tiêu chuẩn | Chế độ Giao diện | |
|---|---|---|
| Q173SCCF | ||
| Số lượng trục điều khiển | Tối đa 20 (MR-J4-B) Tối đa 16 (MR-JE-B) |
Thông số kỹ thuật giống như chế độ tiêu chuẩn |
| Chu kỳ điều khiển[ms] | 0.22ms/0.44ms/0.88ms (Chọn bằng cách sử dụng các tham số.) | |
| Môi trường phát triển phần mềm | CW Workbench/, Wind River Workbench, cho mô-đun Bộ điều khiển C, Công cụ cài đặt/giám sát |
|
| Phương pháp kết nối bộ khuếch đại servo | SSCNETIII/H | |
| Khoảng cách tối đa giữa các trạm [m(ft.)] | 100(328.08) | |
| Bộ khuếch đại servo có thể kết nối | MR-J4(W)-B | |
| Hoạt động JOG | Được cung cấp | − |
| Cấp liệu gia tăng | Được cung cấp | − |
| Vận hành tự động | Phương pháp bảng điểm, điều khiển 1 trục, Kiểm soát siết chặt & lắp ghép |
− |
| Nội suy tuyến tính | Phương pháp bảng điểm, nội suy lên đến 4 trục (Ghi chú-1) | − |
| Phương pháp trở về vị trí gốc | Phương pháp Dog, phương pháp giá đỡ Dog, phương pháp đầu trước Dog, Phương pháp tập dữ liệu, phương pháp chặn, Phương pháp phát hiện pha Z, phương pháp kết hợp công tắc giới hạn, Phương pháp đầu trước công tắc giới hạn, Phương pháp phát hiện tín hiệu vị trí gốc của thước, Phương pháp phát hiện tín hiệu vị trí gốc của thước 2 |
− |
| Bánh răng điện tử | Tử số của bánh răng điện tử: 1 đến 5242879 Mẫu số của bánh răng điện tử: 1 đến 589823 |
− |
| Đơn vị tốc độ | Đơn vị lệnh/phút, đơn vị lệnh/giây, và vòng/phút | Đơn vị lệnh/phút, đơn vị lệnh/giây, và vòng/phút (đơn vị cho tốc độ đầu ra của màn hình) |
| Quá trình gia tốc/giảm tốc | Linear acceleration/deceleration, smoothing filter, tốc độ khởi động, gia tốc/giảm tốc theo đường cong S (gia tốc/giảm tốc hình sin) |
− |
| Chức năng dừng | Dừng cưỡng bức, Dừng hoạt động, Dừng nhanh | Dừng khẩn cấp |
| Thay đổi lệnh | Thay đổi vị trí, Thay đổi tốc độ, Thay đổi hằng số thời gian | − |
| Chức năng ứng dụng | Giới hạn hành trình phần cứng, giới hạn hành trình phần mềm, Khóa liên động, Đầu ra khớp thô, giới hạn mô-men xoắn, bù độ trễ, Công tắc vị trí, Kiểm tra nhiễu (Ghi chú-1) , Giới hạn tìm kiếm vị trí gốc, chuyển đổi độ lợi, chuyển đổi PI-PID, Hệ thống phát hiện vị trí tuyệt đối, Yêu cầu trả về vị trí gốc, Khởi động các trục khác, Đầu vào/đầu ra số, đầu vào/đầu ra chung của bộ khuếch đại servo, Ngắt vị trí vượt qua, hoạt động nối tiếp, phát hiện dấu |
Giới hạn mô-men xoắn, chuyển đổi độ lợi, chuyển đổi PI-PID, Hệ thống phát hiện vị trí tuyệt đối, Đầu vào/Đầu ra kỹ thuật số, Đầu vào/Đầu ra chung của bộ khuếch đại servo, Phát hiện dấu, Phát hiện sự kiện |
| Chức năng bổ sung | Giám sát, Giám sát tốc độ cao, Ngắt, Giám sát máy chủ PC, Sao lưu tham số, Chế độ thử nghiệm, Kết nối/ngắt kết nối, Lấy mẫu, Nhật ký, Lịch sử báo động, Dừng cưỡng bức bên ngoài bị vô hiệu hóa |
|
| Khối lượng [kg] | 0.17 | Thông số kỹ thuật giống như chế độ tiêu chuẩn |
- (Lưu ý-1): Không khả dụng khi chu kỳ điều khiển là 0,22 ms.