Motion module Fitur

FX5-80SSC-G/FX5-40SSC-G

- Konsep
- Fitur
- Positioning Control
- Kontrol sinkron tingkat lanjut
- Kontrol Kecepatan-Torsi
- Fitur Tambahan
- Lingkungan Teknik
- CC-Link IE TSN
- Servo Amplifier MELSERVO-J5/MELSERVO-JET
- Daftar Fungsi
- Tautan Terkait
Konsep
Fitur
Dikombinasikan dengan penguat servo CC-Link IE TSN yang kompatibel, modul Motion menawarkan sistem servo berkinerja tinggi yang meningkatkan kemampuan mesin.
- Melakukan kontrol gerakan tingkat lanjut, seperti kontrol posisi, sinkron, cam, dan kecepatan-torsi.
- Menghubungkan modul I/O jarak jauh dan inverter FR-A800-GN melalui CC-Link IE TSN. Data perangkat ini dapat dibaca/ditulis oleh modul CPU.
- Menghubungkan perangkat TCP/IP, memungkinkan konfigurasi sistem yang fleksibel.
- Memungkinkan untuk menggunakan kembali proyek modul Simple Motion seri MELSEC iQ-F yang sudah ada (model sebelumnya).
Modul Motion memungkinkan kontrol gerakan tingkat lanjut sekaligus menawarkan efektivitas biaya.
Modul ini memiliki kemampuan dan fungsi yang diperlukan untuk sistem mandiri/skala kecil.

FX5-40SSC-G
FX5-80SSC-G
- Jumlah maksimum sumbu kontrol:
4 sumbu/modul (FX5-40SSC-G), 8 sumbu/modul (FX5-80SSC-G)
- Siklus operasi minimum *1 : 500 [μs]
- Jumlah maksimum modul yang terhubung *2 : 4 modul/sistem
- Penguat servo yang kompatibel
MR-J5-G MR-J5D-G4 MR-JET-G
- *1. Siklus operasi bervariasi menurut jumlah sumbu kontrol dan model.
- *2. Ini merujuk pada jumlah total modul Motion dan satu FX5-CCLGN-MS (stasiun induk).
Pemanfaatan Kembali Proyek yang Ada
Proyek yang ada pada modul Simple Motion dapat digunakan kembali. Hal ini memungkinkan pengurangan waktu pengembangan program.
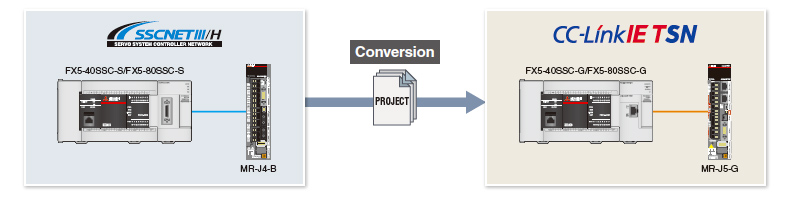
- * Pengaturan parameter untuk jaringan dan penguat servo diperlukan.
Positioning Control
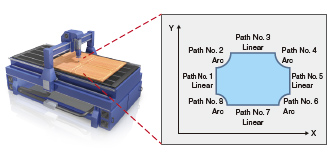
Modul Gerak menjalankan berbagai kontrol posisi, seperti kontrol lintasan yang menggabungkan interpolasi linier dan melingkar serta peralihan posisi-kecepatan.
Interpolasi linier
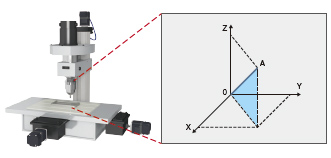
Interpolasi melingkar
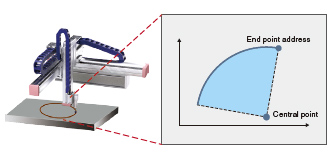
Kontrol lintasan
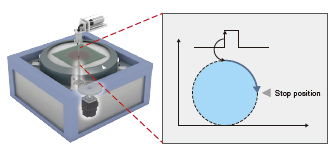
Peralihan kecepatan-posisi
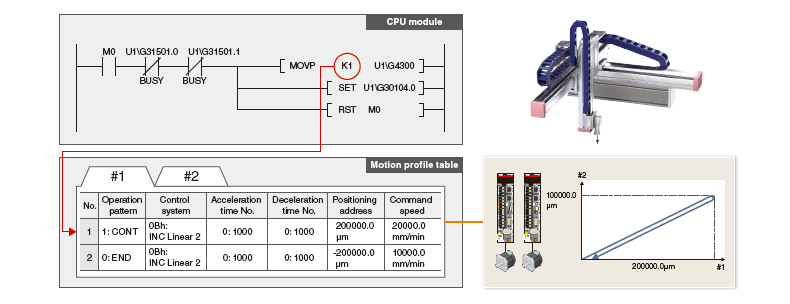
Pemrograman
Modul Motion dengan mudah menjalankan operasi pemosisian dengan instruksi dalam program sekuensial yang memulai data pemosisian tabel profil gerakan. Untuk memenuhi berbagai kebutuhan aplikasi, modul Motion menawarkan berbagai jenis kontrol, seperti interpolasi melingkar linear/dua sumbu, umpan pitch tetap, dan kontrol lintasan.
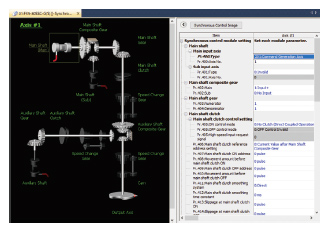
Kontrol sinkron tingkat lanjut
Kontrol sinkron dapat dicapai menggunakan perangkat lunak alih-alih mengendalikan secara mekanis dengan roda gigi, poros, kopling, roda gigi pengubah kecepatan atau cam, dll.
- Kontrol sinkron dapat dimulai/diakhiri secara fleksibel untuk setiap sumbu, yang memungkinkan sumbu kontrol sinkron dan sumbu kontrol pemosisian digunakan dalam program yang sama.
- Sumbu pembangkit perintah, sumbu masukan servo, atau sumbu encoder sinkron *1 dapat ditetapkan sebagai sumbu masukan.
- Sumbu keluaran dioperasikan dengan cam. Tiga operasi berikut dapat dilakukan dengan fungsi cam: operasi linear, operasi dua arah, dan operasi umpan.
- Encoder sinkron inkremental *2 dapat dihubungkan melalui penguat servo MR-J5-G(-RJ)/MR-J5W2-G.
- *1. Didukung oleh seri MELSERVO-J5.
- *2. Saat mengonfigurasi sistem posisi absolut, gunakan encoder motor servo seri HK.
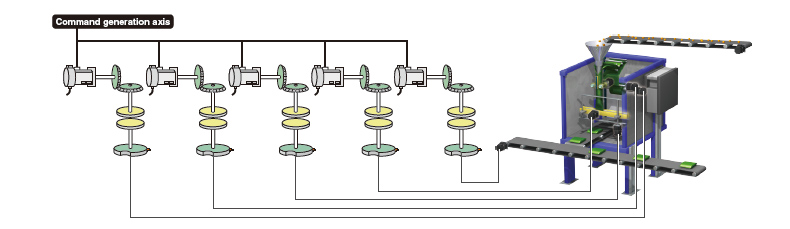
- [Sumbu pembangkit perintah]
- Sumbu pembangkit perintah adalah sumbu yang hanya menjalankan pembangkitan perintah. Sumbu ini dikontrol secara independen dari sumbu lain yang terhubung ke penguat servo. (tidak dihitung sebagai sumbu kontrol)
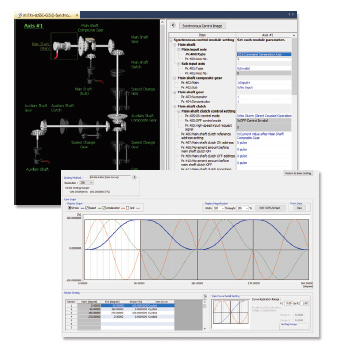
Pengaturan Parameter
Kontrol sinkron dijalankan dengan mengatur parameter sumbu input, sumbu output, roda gigi, dan kopling untuk kontrol sinkron dan menyalakan sinyal mulai kontrol sinkron.
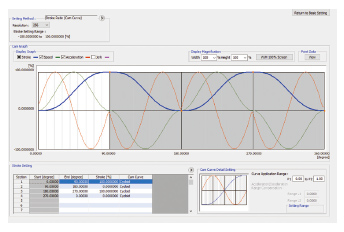
Grafik cam dapat dibuat secara fleksibel dan mudah melalui drag & drop. Bentuk gelombang diubah sesuai dengan gerakan pointer.
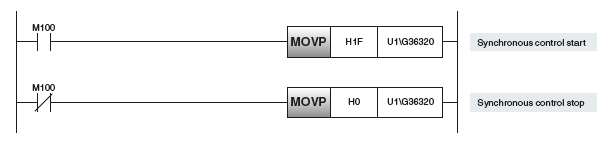
Mulai/Berhenti
Kontrol sinkron dapat dijalankan setelah parameter sinkron ditetapkan untuk setiap sumbu keluaran. Saat sinyal mulai kontrol sinkron dinyalakan, parameter kontrol sinkron dianalisis, dan status diubah menjadi selama kontrol sinkron.
Sumbu keluaran dioperasikan oleh perintah yang dikirimkan dari sumbu masukan.
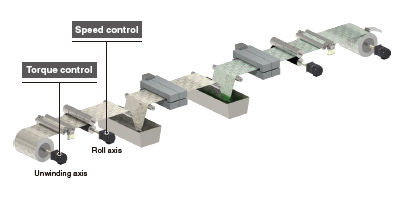
Kontrol Kecepatan-Torsi
Kontrol Kecepatan/Kontrol Torsi
Sumbu dalam kontrol kecepatan dikontrol untuk berjalan pada kecepatan konstan mengikuti perintah kecepatan, dan sumbu dalam kontrol torsi berada pada torsi konstan mengikuti perintah torsi.
Modul Gerak dapat digunakan untuk aplikasi kontrol tegangan, seperti melepas atau memasang kembali gulungan.
Selain itu, posisi saat ini selalu dilacak bahkan dalam kontrol kecepatan dan torsi, dan oleh karena itu pemosisian dilakukan dengan lancar sesuai dengan koordinat posisi absolut dalam kontrol posisi setelah dialihkan dari kontrol kecepatan dan torsi.
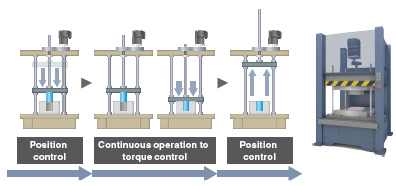
Pengoperasian Berkelanjutan hingga Kontrol Torsi
Saat menggunakan kontrol ini, Anda dapat beralih dari kontrol posisi ke kontrol torsi secara terus-menerus tanpa menghentikan motor servo.
- Posisi saat ini selalu dilacak bahkan dalam kontrol torsi, dan oleh karena itu pemosisian dijalankan dengan lancar dalam kontrol posisi setelah dialihkan dari kontrol torsi.
- Kontrol posisi dialihkan dengan lancar ke kontrol torsi tanpa menghentikan motor servo.
Fitur Tambahan
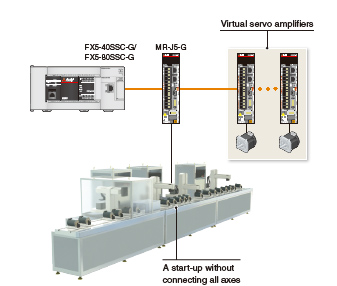
Penguat Servo Virtual
Fungsi penguat servo virtual memungkinkan pengoperasian penguat servo virtual seolah-olah unit sebenarnya terhubung.
Ketika penguat servo virtual ditetapkan sebagai sumbu input servo kontrol sinkron, modul Gerak menjalankan kontrol sinkron dengan perintah input yang dihasilkan secara virtual.
Selain itu, fungsi ini digunakan untuk mensimulasikan sumbu tanpa koneksi aktual.
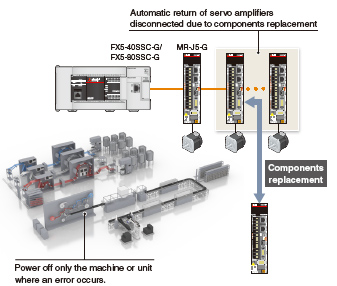
Pengembalian Otomatis
Ketika stasiun jarak jauh kembali ke status normal setelah terputus karena kesalahan tautan data, fungsi ini secara otomatis mengembalikan stasiun yang terputus ke jaringan dan memulai kembali tautan data.
Ketika komponen yang rusak perlu diganti di salah satu mesin dalam jalur produksi atau salah satu unit dalam mesin, hanya mesin atau unit yang dapat dimatikan sebagian tanpa mematikan seluruh sistem.
Pengoperasian Tanpa Baterai
Modul Gerak dan penguat servo dapat dioperasikan tanpa baterai. *1
Biaya perawatan berkurang karena tidak perlu lagi mengganti baterai dan mengontrol stok.
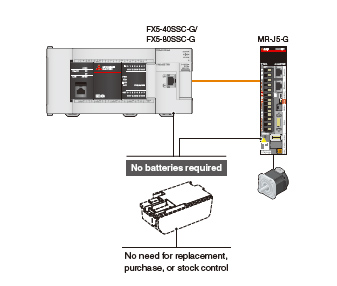
- *1. Motor penggerak langsung mungkin memerlukan baterai.
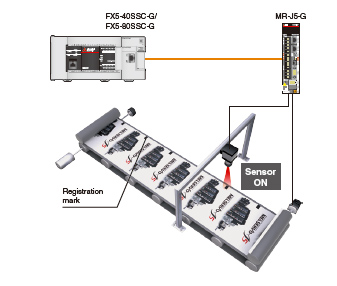
Deteksi Tanda
Fungsi ini mengunci data yang merespons input sinyal pemicu ke penguat servo.
Jumlah kompensasi dihitung berdasarkan data yang dikunci, dan kesalahan dikompensasi menggunakan sumbu kompensasi.
Deteksi tanda dengan akurasi tinggi pada 1 μs tersedia. Ditingkatkan
Lingkungan Teknik
MELSOFT GX Works3
MELSOFT GX Works3 memiliki berbagai fitur yang membantu pengguna membuat proyek dan melakukan perawatan dengan lebih fleksibel dan mudah.
Berbagai perangkat lunak rekayasa kami (GX Works3, perangkat lunak pengukuran sistem penggerak, dan Alat Pemilihan Terpadu FA, dll.) sepenuhnya mencakup semua tahap proses pengembangan mulai dari pengaturan parameter hingga perawatan modul Gerak, penguat servo, dan motor servo.




Desain Sistem

- Konfigurasi modul
- Konfigurasi jaringan
- Pengaturan data untuk penguat servo
- Pengaturan untuk I/O jarak jauh
Pemrograman (Penempatan)

- Pemrograman dengan Ladder, SFC, FBD/LD
- Pengaturan data posisi
- Simulasi offline, perhitungan otomatis kecepatan perintah
Pemrograman (Kontrol Sinkron)
- Parameter kontrol sinkron
- Pembuatan data cam, daftar data cam
Debug/Pemeliharaan

- Riwayat kejadian
- Riwayat nilai saat ini, riwayat awal, monitor sumbu
- Monitor servo
- Osiloskop digital
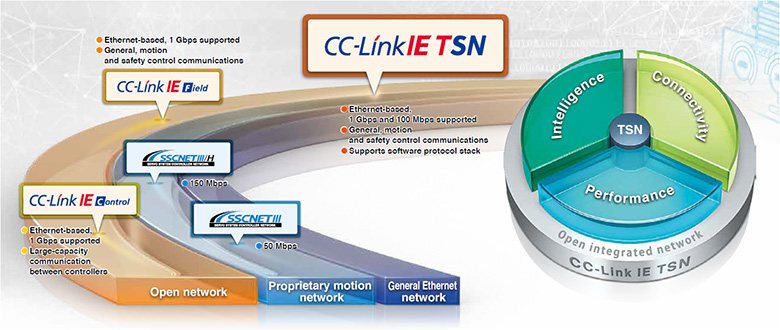
Jaringan terintegrasi terbuka di seluruh perusahaan manufaktur
CC-Link IE TSN mendukung komunikasi TCP/IP dan menerapkannya pada arsitektur industri melalui dukungan TSN yang memungkinkan komunikasi waktu nyata.
Dengan arsitektur sistem yang fleksibel dan fitur pengaturan serta pemecahan masalah yang ekstensif menjadikan CC-Link IE TSN ideal untuk membangun infrastruktur IIoT di seluruh perusahaan manufaktur.
- * TSN: Jaringan Sensitif Waktu
- * IIoT: Internet of Things Industri

Servo Amplifier MELSERVO-J5/MELSERVO-JET

Servo amplifier berkinerja tinggi dan terdepan di industri seri MELSERVO-J5 memiliki mesin kontrol unik yang lebih bertenaga dari sebelumnya.
Servo amplifier ini dapat dihubungkan ke CC-Link IE TSN untuk melakukan kontrol berkecepatan tinggi dan presisi tinggi.
Servo amplifier multi-sumbu MR-J5W-G/MR-J5W-B dan unit penggerak MR-J5D-G4 menyederhanakan pemasangan kabel dan memungkinkan mesin yang ringkas.
- *1. MR-J5-G/MR-J5D1-G4 mendukung 31,25 μs.



Penguat servo berkinerja tinggi seri MELSERVO-JET memiliki mesin kontrol unik yang lebih bertenaga dari sebelumnya.
Penguat servo ini dapat dihubungkan ke CC-Link IE TSN untuk melakukan kontrol berkecepatan tinggi dan presisi tinggi.
Penguat servo mendukung motor servo linier selain motor putar.
EtherCAT ® didukung oleh MR-JET-G-N1.
Daftar Fungsi
| Motion Module | |||
|---|---|---|---|
| FX5-40SSC-G | FX5-80SSC-G | ||
| Maximum number of control axes | 4 axes | 8 axes | |
| Operation cycle (operation cycle setting) [μs] |
500, 1000, 2000, 4000 | ||
| Servo amplifier connection method | CC-Link IE TSN (communication speed: 1 Gbps/100 Mbps) | ||
| Compatible servo amplifiers | MR-J5-G, MR-J5W-G, MR-J5D-G4 Selengkapnya MR-JET-G Selengkapnya |
||
| Interpolation function | Linear interpolation (up to 4 axes), 2-axis circular interpolation | ||
| Control method | Positioning control, trajectory control (linear and arc), speed control, speed-torque control, synchronous control, continuous operation to torque control |
||
| Acceleration/deceleration processing |
Trapezoidal acceleration/deceleration, S-curve acceleration/deceleration | ||
| Compensation function | Backlash compensation, electronic gear, near pass function | ||
| Synchronous control | Synchronous encoder input, command generation axis, cam, phase compensation | ||
| Cam control | Number of cam registrations *1 |
Up to 128 | |
| Cam data | Stroke ratio data format, coordinate data format | ||
| Cam auto- generation |
Cam auto-generation for rotary knife | ||
| Positioning control method | Motion profile table | ||
| Control unit | mm, inch, degree, pulse | ||
| Number of positioning data | 600 data (positioning data No. 1 to 600)/axis (Can be set with MELSOFT GX Works3 or a sequence program.) |
||
| Backup | Parameters, positioning data, and block start data can be saved on flash ROM (batteryless backup) | ||
| Home position return | Driver home position return *2 | ||
| Positioning control | Linear interpolation control (Up to 4 axes *3 (vector speed, reference axis speed)), fixed-pitch feed control (up to 4 axes), 2-axis circular interpolation (auxiliary point-specified, central point-specified), speed control (up to 4 axes), speed-position switching control (INC mode, ABS mode), position-speed switching control (INC mode), current value change (positioning data, start No. for a current value changing) NOP instruction, JUMP instruction, LOOP, LEND, block start, condition start, wait start, simultaneous start, repeated start |
||
| Manual control | JOG operation, inching operation, manual pulse generator operation (up to 1 module (incremental), unit magnification (1 to 10000 times), via CPU (buffer memory)) |
||
| Speed-torque control | Speed control not including position loop, torque control, continuous operation to torque control | ||
| Absolute position system | Provided | ||
| Synchronous encoder operation function | Up to 4 modules (via a servo amplifier or a CPU) | ||
| Speed limit | Speed limit value, JOG speed limit value | ||
| Torque limit function | Torque limit value same setting, torque limit value individual setting | ||
| Forced stop | Via buffer memory, valid/invalid setting | ||
| Software stroke limit function | Movable range check with feed current value or with machine feed value | ||
| Hardware stroke limit function | Provided | ||
| Speed change | Provided | ||
| Override | 0 to 300 [%] | ||
| Acceleration/deceleration process change | Acceleration/deceleration time | ||
| Torque limit change | Provided | ||
| Target position change | Speed to a target position address and a target position is changeable. | ||
| M-code output function | Provided | ||
| Other functions |
Step function | Deceleration unit step, data No. unit step | |
| Skip function | Via CPU, via external command signal | ||
| Parameter initialization function | Provided | ||
| External input signal select function | Via CPU, via servo amplifier | ||
| Mark detection function | Continuous detection mode, specified number of detections mode, ring buffer mode | ||
| Mark detection signal | Up to the number of axes of the connected servo amplifiers | ||
| Mark detection setting | 16 settings | ||
| Optional data monitor function | Up to 4 points/axis | ||
| Functional safety | DI/O connection of the servo amplifier *4 | ||
| Automatic return | Provided | ||
| Digital oscilloscope function | Bit data: 16 channels, word data: 16 channels *5 | ||
- *1. Jumlah registrasi cam bergantung pada kapasitas memori, resolusi cam, dan jumlah koordinat.
- *2. Metode pengembalian posisi awal yang ditetapkan dalam driver (penguat servo) digunakan.
- *3. Kontrol interpolasi linier 4 sumbu diaktifkan hanya pada kecepatan sumbu referensi.
- *4. Modul ekstensi keselamatan dapat dikombinasikan dengan modul Motion dengan versi 1.001 atau yang lebih baru.
- *5. Delapan saluran masing-masing data kata dan data bit dapat ditampilkan secara real-time.