Simple Motion module Fitur-RD77MS

RD77MS
- Konsep
- Fitur
- SSCNET III/H
- Positioning Control
- Kontrol Sinkron Lanjutan
- Fungsi Cam
- Simulasi
- Fungsi Penyesuaian Multi-sumbu
- Interpolasi Heliks
- Aliran Kontrol
- Daftar Fungsi
- Tautan Terkait
Konsep

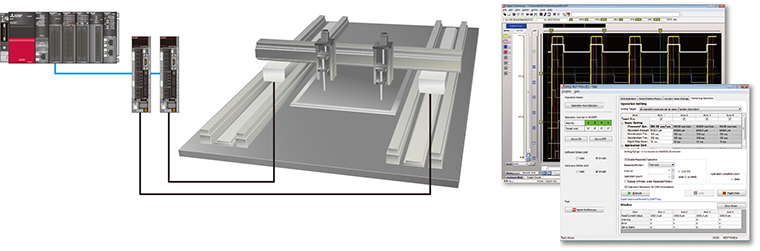
Seri MELSEC iQ-R dilengkapi dengan mesin ganda yang canggih: mesin CPU PLC untuk kontrol mesin dan mesin CPU Motion untuk kontrol Motion. Masing-masing mesin memproses berbagai jenis kontrol berdasarkan karakteristik masing-masing mesin sambil bekerja sama pada data melalui bus sistem berkecepatan tinggi. Beban CPU didistribusikan secara signifikan oleh mesin ganda ini dibandingkan dengan mesin tunggal, yang memungkinkan peralatan apa pun untuk memaksimalkan kinerjanya, bahkan untuk mesin pengubah beban atau peralatan multi-sumbu.

Penguat servo seri MELSERVO-J4 merupakan produk yang ramah lingkungan dan ramah pengguna, sekaligus menawarkan tingkat kinerja terdepan di industri. Menghubungkan penguat ke jaringan optik "SSCNETIII/H" memungkinkan kontrol kecepatan tinggi dan akurasi tinggi dengan mesin khusus MR-J4 dan enkoder beresolusi tinggi.
Pilih kombinasi mesin CPU yang paling sesuai yang dapat mengurangi biaya dan memaksimalkan kinerja mesin secara maksimal dari lini produk kami yang luas. Efisiensi dalam perancangan dan debugging juga ditingkatkan.

Efisiensi pemrograman penting dalam hal produktivitas. Seri MELSEC iQ-R mengoptimalkan semua prosedur, mulai dari perancangan, debugging, hingga startup.


Dilengkapi dengan mesin ganda canggih yang hanya mungkin dilakukan dengan teknologi platform iQ mutakhir kami, seri MELSEC iQ-R melangkah lebih jauh untuk mempercepat revolusi peralatan dengan berkolaborasi dengan perusahaan mitra kami. Kini, tersedia berbagai macam produk mitra yang kompatibel dengan SSCNETIII/H, seperti motor stepper dan motor penggerak langsung.
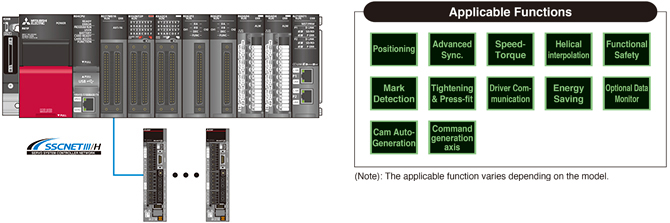
Fitur
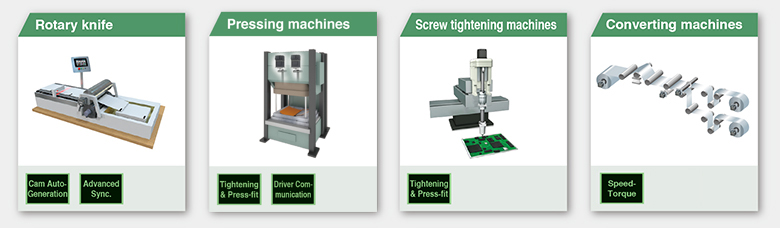
- Kontrol gerakan canggih dan bercakupan luas, seperti kontrol sinkron canggih, kontrol cam, kontrol kecepatan-torsi (kontrol pengencangan & penekanan) dapat dicapai hanya dengan program sekuensial yang mencakup blok fungsi.
- Semua fungsi QD75MH disertakan dalam modul Simple Motion.
- Dari pemrograman hingga konfigurasi penguat servo, semuanya dikemas dalam perangkat lunak rekayasa yang mudah digunakan (MELSOFT GX Works3).
Fungsionalitas Luar Biasa untuk Berbagai Aplikasi
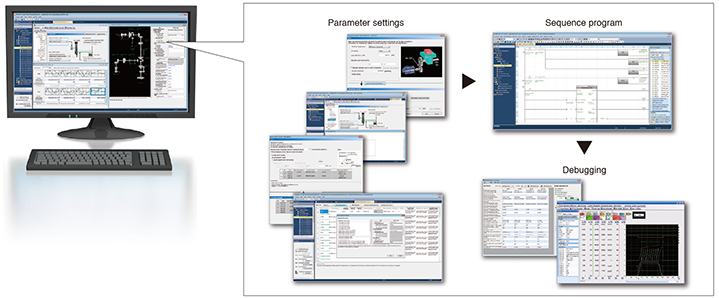
Alat Teknik Serbaguna
Berbagai fitur telah digabungkan dalam satu perangkat lunak (MELSOFT GX Works3), yang mencakup mulai dari pemrograman hingga debugging untuk sistem servo yang terdiri dari modul Simple Motion dan penguat servo.
Kinerja Dasar
Waktu sentuh berkurang drastis dengan meningkatkan kinerja dasar modul Simple Motion.
Jaringan Sinkron Berkecepatan Tinggi SSCNETIII/H
- Kecepatan komunikasi ditingkatkan menjadi 150 Mbps full duplex (setara dengan 300 Mbps half duplex), tiga kali lebih cepat dari kecepatan konvensional.
Respons sistem ditingkatkan secara dramatis. - Kontrol mesin yang lancar dimungkinkan menggunakan komunikasi serial berkecepatan tinggi dengan waktu siklus 0,222 ms.
- Komunikasi sinkron dicapai dengan SSCNETIII/H, yang menawarkan keuntungan teknis untuk mesin yang memerlukan kontrol deterministik.
- Pengkabelan jarak jauh dimungkinkan hingga 3200 m (10498,69 kaki) per sistem (maksimum 100 m (328,08 kaki) antara stasiun x sumbu kontrol hingga 32 sumbu), cocok untuk sistem skala besar.
- Penguat servo yang kompatibel dengan SSCNETIII/H dan yang kompatibel dengan SSCNETIII dapat digunakan bersama-sama.
(Kecepatan komunikasi saat produk yang kompatibel dengan SSCNETIII digunakan bersama-sama dalam sistem yang sama: 150 Mbps dupleks penuh)
(Catatan): SSCNET (Servo System Controller Network)
Positioning Control
Kontrol posisi dapat dilakukan dengan mudah menggunakan tabel profil Gerakan.
Kontrol Posisi Dasar

- Untuk menanggapi berbagai kebutuhan aplikasi, modul Simple Motion menawarkan berbagai metode kontrol, seperti interpolasi linier, interpolasi melingkar 2 sumbu, umpan pitch tetap, dan kontrol jalur kontinu.
- Pengoperasian otomatis dapat dijalankan dengan mudah dengan mengatur alamat posisi, kecepatan, dan item pengaturan lainnya dalam program sekuens.
- Subfungsi yang canggih, seperti keluaran kode-M, lewati, perubahan kecepatan, dan fungsi perubahan posisi target, tersedia.
Kontrol Sinkron Lanjutan
Kontrol sinkron tingkat lanjut adalah kontrol sinkron berbasis perangkat lunak sebagai alternatif kontrol mekanis, seperti roda gigi, poros, kopling, roda gigi pengubah kecepatan, dan cam. Selain itu, kontrol cam menjadi lebih mudah dengan fungsi pembangkitan cam otomatis.
Kontrol sinkron dapat dimulai/diakhiri secara fleksibel untuk setiap sumbu, yang memungkinkan sumbu kontrol sinkron dan sumbu kontrol posisi digunakan dalam program yang sama.
Semua sumbu disinkronkan menggunakan sumbu enkoder sinkron atau sumbu masukan servo.
Mesin pengemas, mesin cetak,
mesin pembuat popok,
mesin cetak ban
Hanya dua sumbu yang disinkronkan. Sumbu lainnya berada dalam kontrol posisi.
Konfigurasi tandem
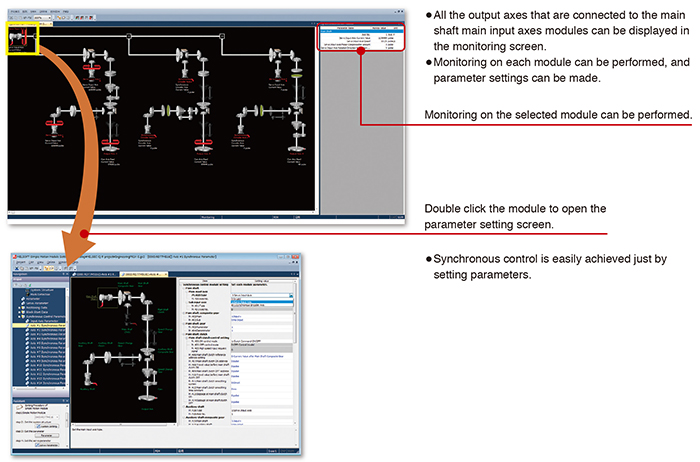
Konfigurasi modul kontrol sinkron
Seluruh konfigurasi modul kontrol sinkron tingkat lanjut dapat ditampilkan dalam satu layar, dan pemantauan modul target juga dapat dilihat, yang memungkinkan penelusuran kesalahan yang lebih efisien.
Fungsi Cam
Sumbu keluaran untuk kontrol sinkron dioperasikan dengan cam.
Tiga operasi berikut dapat dilakukan dengan fungsi cam: Operasi linier, Operasi dua arah, dan Operasi umpan; oleh karena itu, salah satu dari ketiganya dapat dipilih sesuai dengan aplikasi Anda.
Simulasi
Simulasi MELSOFT GX Works3 memungkinkan operasi program diperiksa tanpa mesin yang sebenarnya bahkan selama proses debugging dan karenanya waktu mulai yang lebih singkat. Selain itu, beberapa modul Simple Motion dapat disimulasikan pada saat yang sama.

Fungsi Penyesuaian Multi-sumbu
Fungsi penyesuaian multi-sumbu memungkinkan penyesuaian servo yang lebih sederhana dan pengaktifan yang lebih cepat untuk mesin yang menjalankan operasi multi-sumbu secara simultan, seperti konfigurasi tandem.
- Operasi JOG multi-sumbu secara simultan dengan menentukan kecepatan dan waktu akselerasi/deselerasi
- Pemosisian multi-sumbu secara simultan
- Penyetelan multi-sumbu secara simultan dengan pengaturan yang sama
Interpolasi heliks
Interpolasi heliks menggambar lintasan heliks dengan sumbu interpolasi linier (sumbu Z) mengikuti kontrol interpolasi melingkar 2-sumbu (sumbu X dan sumbu Y).
Untuk aplikasi yang memerlukan pengeboran lubang yang dalam dan besar, biasanya interpolasi heliks dari ketiga sumbu harus dipertimbangkan.
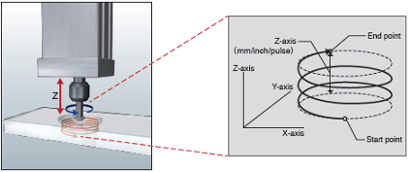
- Penggilingan dilakukan dalam bentuk lingkaran, dengan sumbu X dan Y disinkronkan untuk mencapai ukuran yang telah ditetapkan.
- Kedalaman lubang dikontrol secara bersamaan di sepanjang sumbu Z, memastikan deviasi minimal pada posisi mata pemotong.
Aliran Kontrol
Berbagai kontrol posisi seperti interpolasi linier dapat dilakukan hanya dengan menulis data posisi ke memori buffer menggunakan program sekuens atau blok fungsi.
Daftar Fungsi
| Simple Motion Module | ||||
|---|---|---|---|---|
| RD77MS16 | RD77MS8 | RD77MS4 | RD77MS2 | |
| Number of control axes (Virtual servo amplifier axis included) |
Up to 16 axes | Up to 8 axes | Up to 4 axes | Up to 2 axes |
| Operation cycle [ms] (Operation cycle settings) |
0.444, 0.888, 1.777, 3.555 | |||
| Servo amplifier connection method |
SSCNETIII/H (150Mbps) | |||
| Maximum distance between stations [m(ft.)] |
100(328.08) | |||
| Connectable servo amplifier | MR-J5-B, MR-J5W-B Selengkapnya MR-J4-B, MR-J4W-B Selengkapnya MR-JE-B Selengkapnya |
|||
| Control modes | Position control, Speed control, Torque control, Speed-torque control, Speed-position switching control, Position-speed switching control, Path control (Linear, arc, and helical) |
|||
| Positioning control | Speed control, Linear interpolation (Up to 4 axes), Circular interpolation (2 axes), Helical interpolation (3 axes), Fixed-pitch feed, Continuous path, Speed-position switching control, Position-speed switching control, Current value change, Current value change. Loop control |
|||
| Acceleration/ deceleration process |
Trapezoidal acceleration/deceleration, S-curve acceleration/deceleration | |||
| Number of positioning data | 600 data (positioning data No. 1 to 600)/axis | |||
| Home position return method | Proximity dog method, Count method 1, Count method 2, Data set method, Scale home position signal detection method, Driver home position return method (Note-1) |
|||
| Manual control | JOG operation, Manual pulse generator operation, Inching operation | |||
| Expansion control | Speed-torque control, Advanced synchronous control | |||
| Auxiliary functions | Forced stop function, Hardware stroke limit function, Software stroke limit function, Absolute position system, Speed change, Torque change, M-code output function, Digital oscilloscope function, Cam auto-generation function, Target position change function |
|||
| Common functions | Amplifier-less operation, Optional data monitor, Mark detection, Event history | |||
| Lingkungan Teknik | MELSOFT GX Works3 | |||
| Number of I/O occupying points | 32 points (I/O allocation: Intelligent function module, 32 points) | |||
| 5VDC internal current consumption [A] |
1.0 | |||
| Mass [kg] | 0.23 | 0.22 | ||
- (Catatan-1):
- Metode pengembalian posisi awal yang diatur dalam driver (penguat servo) digunakan.